





概述
当今社会中,信息化,数字化无处不在,无线通信技术和导航测距技术已经非常成功的应用到各个领域之中,我们生活的各个方面都离不开这些技术的应用,例如我们到一个地方扫描附近的商场、餐厅,都会与我们所处在的位置形成交叉检测,还比如最近疫情期间如果要到公共场所,不仅仅做好个人防护,戴好口罩外,还需要去扫描要去的场所的二维码,如此我们的相关核算检疫信息及行程信息被提炼出来并与我们所取场所的位置形成绑定关系,相当于我们到过这个地方。因此位置服务已经成为我们日常生活的一个很重要的部分
随着无线传感网络的日益发展,关于室内定位的技术手段也都取得了突飞猛进的成果,尤其是ZigBee定位、WIFI定位、BLUETOOTH定位、RFID定位、UWB定位在室内定位领域的运用已经非常广泛。
定位方法
所有的定位技术前端的数据会通过各种通讯方式来获得各种信号;但都是基于以下几种常用的原理
靠近感知方式
通过射频信号的接收来判断移动设备是否靠近基站;类似我们的考勤系统,这种方式的实施相对比较简单,但定位精度会比较低
三角定位法
这种方式基于平面的坐标,是在获取待测目标相对2个已知参考点的角度后结合两参考点间的距离信息可以确定唯一的三角形,即可确定待测目标的位置。
质心定位法
是根据移动设备可接收信号范围内所有已知的信标(beacon)位置,计算其质心坐标作为移动设备的坐标。相应地,也可以根据接收信号强度指示设置对应的信标的权重,得到加权质心作为移动设备的坐标。该方法算法易于理解,计算量小,定位精度取决于信标的布设密度
多边定位法
是通过测量待测目标到已知参考点之间的距离,从而确定待测目标的位置。基于多边定位的定位系统可以采用多种距离估计方法,
极点法
通过测量相对某一已知参考点的距离和角度从而确定待测点的位置。 该方法仅需已知一个参考点的位置坐标,因此使用非常方便,已经在大地测量中得到广泛应用
指纹定位法
在定位空间中建立指纹数据库,通过将实际信息与数据库中的参数进行对比来实现定位。 指纹定位的优势是几乎不需要参考测量点,定位精度相对较高;但缺点是前期离线建立指纹库的工作量巨大,同时很难自适应于环境变化较大的场景
航位推算法
是在已知上一位置的基础上,通过计算或已知的运动速度和时间计算得到当前的位置。 数据稳定,无依赖,但该方法存在累积误差,定位精度随着时间增加而恶化
定位算法
Time of Arrival (ToA) / Time of Flight (ToF)
ToA是指利用信号传播的时间来测距。需要注意的是电磁波在不同介质中的传播速度不同,通常成反比。ToA取决于时间的精度。由于多路径问题目前在室内定位中应用比较困难(参考LoS光束的信号中的自相关峰值可能不能被解析),可考虑应用更宽的频率波段解决这一问题
Time Difference of Arrival(TDoA,到达时间差)
利用已知位置的同步发射机的到达时间差计算出接收机的位置,TDOA 是一种利用时间差进行定位的方法,通过测量信号到达监测站的时间,可以确定信号源的距离。利用信号源到多个无线电监测站的距离(以无线电监测站为中心,距离为半径作圆),就能确定信号的位置。通过比较信号到达多个监测站的时间差,就能作出以监测站为焦点、距离差为长轴的双曲线,双曲线的交点就是信号的位置。TDOA 是基于多站点的定位系统,因此要对信号进行定位必须有至少3 个以上的监测站进行同时测量。而每个监测站的组成则相对比较简单,主要包括接收机,天线和时间同步模块
Round Trip Time (往返时间,RTT) / Roundtrip
RTT通过分别测量下行PRS,上行SRS,得到被定位终端与多个基站的RTT,从而确定终端的位置。该定位方法支持单站和多站定位。当只有一个基站参与定位是,RTT需与AoA结合。RTT技术不需要站间严格同步,室内外均可使用
Phase of Arrival (PoA) / Phase Difference (PD):
PoA使用接收的载波相位来确定两个设备之间的距离。 为了减轻相位缠绕,在多个频率上评估接收的信号相位。距离由相变率确定。
Doppler Ranging(多普勒测距)
多普勒测距技术用于观察发射机和接收机之间的相对速度。 如果使用固定信号源,则可以从测得的多普勒频移得出沿视线的绝对速度。给定已知的初始位置和多个多普勒频率观测值,可以确定移动设备的位移
Angle of Arrival (AoA) / Angulation / Triangulation / Direction based Positioning:
AOA(到达角度)定位是一种两基站定位方法,基于信号的入射角度进行定位.基于信号到达角度的定位算法是一种典型的基于测距的定位算法,通过某些硬件设备感知发射节点信号的到达方向,计算接收节点和锚节点之间的相对方位或角度,然后再利用三角测量法或其他方式计算出未知节点的位置
Near‐Field Electromagnetic Ranging (近场电磁测距,NFER):
NEER的原理是电磁场的相位随着天线周围的距离而变化,NFER具有潜在的距离测量精度范围30厘米至1米,作业距离可达300米
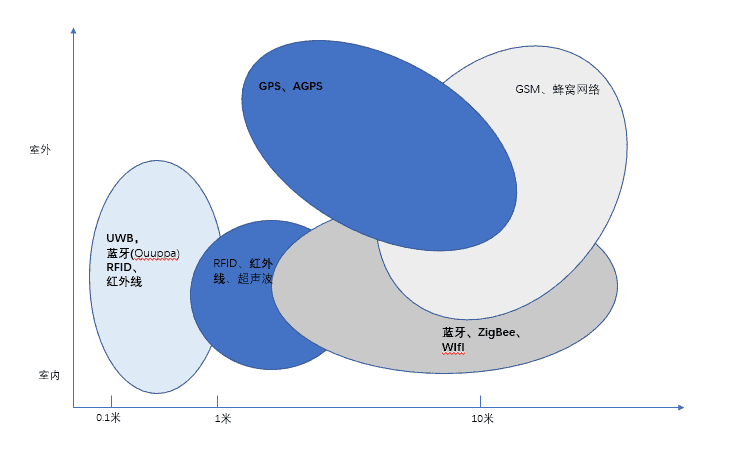
几种常用的室内定位技术
各种定位技术侧重点不一样,所涉及的领域和市场也有不同。在具体场景中,要多方面考虑来决定用那种方案来进行,一般实际的考量点有定位精度、定位范围、定位数量、用户数量、私密性、设备安装、更新频率、功耗、可扩展性、兼容其他系统、输出数据的格式、以及最重要的成本。因此可以说在这个领域没有一个技术可以通吃所有的场景和领域;只能根据具体的场景和需要做一些取舍和判断。
Zigbee定位
ZigBee是一种短距离、低速率无线网络技术,它介于射频识别和蓝牙之间。它有自己的无线电标准,在数千个微小的传感器之间相互协调通信以实现定位。这些传感器只需要很少的能量,以接力的方式通过无线电波将数据从一个传感器传到另一个传感器,所以它们的通信效率非常高。ZigBee最显著的技术特点是它的低功耗和低成本。我们公司代理的digi在ZigBee相关技术有较强的领先性。
WI-FI定位
城市中的公共场所如大型超市商场、学校、企业等都已经广泛部署WiFi。WiFi室内定位技术已经出现了很多具有代表性的研究成果,如RADAR系统、Nibble系统、Weyes系统等室内定位系统。由于WiFi网络的普及,WiFi定位是目前比较流行的定位技术,定位精度能达到米级,定位成本低,定位信号收发范围大,适用性强,可以被普及推广。但无论是用于室内还是室外定位,Wi-Fi收发器都只能覆盖半径90米以内的区域,而且很容易受到其他信号的干扰,从而影响其精度,定位器的能耗也较高.Skyhook是一家专门做WIFI定位算法的公司,运营着世界上最大的独立定位网络,由45亿多个地理定位Wi-Fi热点和1.8亿多个地理定位小区ID组成。现在已经被Qualcomm收购
Bluetooth定位
蓝牙技术大部分是通过测量信号强度进行室内定位;iBeacon是苹果公司制定的专用于蓝牙定位的一种协议技术,定位精度在2~3m,我们公司代理的Quuppa的蓝牙定位产品,基于低功耗蓝牙®技术,独特的到达角信号处理方法,定位精度可以达到10厘米。详情请参考我们的商店信息及Quuppa的网站。
RFID定位
射频识别(Radio FrequencyIdentification,简称RFID)定位技术利用射频信号进行非接触式双向通信交换数据以达到识别和定位的目的;这种技术作用距离短,一般最长为几十米。可以在几毫秒内得到厘米级定位精度的信息,且传输范围很大,成本较低;但是由于其射频信号不具有通信能力,只使用射频识别技术是不能进行室内定位的,必须与其他辅助技术相结合才能完成。
UWB定位
超宽带(Ultra WideBand,UWB)技术不需要使用传统通信体制中的载波,而是通过发送和接收具有纳秒或纳秒级以下的极窄脉冲来传输数据,从而具有GHz量级的带宽,实现室内定位。超宽带可用于室内精确定位,例如战场士兵的位置发现、机器人运动跟踪等。超宽带系统与传统的窄带系统相比,具有穿透力强、功耗低、抗多径效果好、安全性高、系统复杂度低、能提供精确定位精度等优点。因此,超宽带技术可以应用于室内静止或者移动物体以及人的定位跟踪与导航,且能提供十分精确的定位精度.UWB定位芯片主要供应商是Decawave;在2020年被Qorvo以4亿美金收购。
UWB芯片供应商
| 供应商 | 产品型号 | 标准 | 频段 | 发布日期 |
| Microchip | ATA8350 | LRP | 6.2-7.8GHz | Feb 2021 |
| Microchip | ATA8352 | LRP | 6.2-8.3GHz | Feb 2021 |
| NXP | NCJ29D5 | HRP | 6–8.5 GHz | Nov 12, 2019 |
| NXP | SR100T | HRP | 6–9 GHz | Sept 17, 2019 |
| Apple Inc. | U1 | HRP | 6–8.5 GHz | Sept 11, 2019 |
| Qorvo | DW1000 | HRP | 3.5–6.5 GHz | Nov 7, 2013 |
| Qorvo | DW3000 | HRP | 6–8.5 GHz | Jan 2019 |
| 3 dB | 3DB6830 | LRP | 6–8 GHz | |
| CEVA | RivieraWaves UWB | HRP | 3.1–10.6 GHz depending on radio | Jun 24, 2021 |
红外线定位
红外线定位通过室内的光学传感器接收到的红外线发射器发射出的特定红外线(InfraredRay)后进行定位。Cambridge大学AT&T实验室开发的红外线室外定位系统Active BadgeSystem被称为第一代的室内定位系统;Ambiplex在2011年提出了IR.Loc系统通过测量热辐射进行定位,在10m范围内的定位精度达到20~30cm。红外线室内定位精度相对较高,但是无法穿透障碍物,仅在直线可视距离内传播,有效距离较短,受室内布局和灯光影响较大,定位成本较高
A-GPS定位
A-GPS(Assistant-GPS,辅助全球定位技术)由美国高通公司提出,利用手机基站信号,辅以连接远程服务器,配合接收机来实现快速定位,广泛应用于具有GPS功能的手机上。A-GPS定位的速度快、精度较高,但是要与服务器进行多次网络通信,占用了大量的通信资源。UBLOX作为一家总部在瑞士,为汽车、工业和消费品市场提供定位和无线通信技术的供应商,可以说是全球排名较前的GPS供应商。其消费类的F9P模块的精度已经可以达到米级。
超声波定位
超声波测距主要采用反射式测距法,通过三角定位等算法确定物体的位置,即发射超声波并接收由被测物产生的回波,根据回波与发射波的时间差计算出待测距离,有的则采用单向测距法。超声波定位整体定位精度较高,结构简单,但超声波受多径效应和非视距传播影响很大,同时需要大量的底层硬件设施投资,成本太高
惯性传感器定位
利用惯性传感器采集的运动数据,如加速度传感器、陀螺仪等测量物体的速度、方向、加速度等信息,通过积分定位方法或者基于航位推测法,经过各种运算得到物体的位置信息。物体或任务运动或行走时间增长,惯性导航数据的误差也在不断累积。因此此项技术一般与GNSS技术相结合进行辅助导航,在无法接收到其他有效定位信号的情况下,用来作为辅助定位使用
参考数据
Mautz R. Indoor Positioning Technologies
内容审核:许聪 Josh Xu