





定位技术概述
定位就是确定一个物体(包括人本身或其他生物)在空间位置的一种机制和系统;至今为止定位技术已经具有米级精度的全球覆盖到具有亚毫米级精度的工作空间覆盖,应用的领域非常广泛。从覆盖范围有行星级别的定位(可以判别各个行星的位置)、全球导航卫星系统定位(美国的GPS,俄罗斯的GLONASS、欧洲的伽利略、中国的北斗、印度的IRNSS)、区域定位(军方使用的比较多,类似美国的LORAN远程导航系统,可以覆盖2500公里和精度在30公里的系统)和本地系统定位;其中本地系统定位则包括室内定位、工作空间定位和在高速机床、激光扫描过程中的高性能。定位技术的分支大致包含以下几类:
- 声学定位是利用声音来确定其来源或反射器的距离和方向。定位可以主动或被动地进行,并且可以在气体(如大气层),液体(如水或油脂)和固体(如在土壤或木材)中发生。
- TOF(Time of flight)飞行时间技术:通过测量脉冲信号在发射器和接收器之间的传播时间来确定距离;当至少三个位置的距离已知时,可以使用三边测量确定第四个位置。全球定位系统就是一个例子。
- 空间扫描系统使用(光学)信标和传感器;通过将传感器对准信标,可以测量它们之间的角度。通过三角测量,可以确定物体的位置
- 惯性导航定位的主要优点是不需要外部基准电压源。相反,它使用陀螺仪测量旋转,或使用加速度计测量相对于已知起始位置和方向的位置。由于这些系统测量的是相对位置而不是绝对位置,因此它们可能会遭受累积误差的影响,因此容易发生漂移。定期重新校准系统将提供更高的精度
- 相位差系统定位来自移动目标发射器的输入信号的相位偏移与来自参考发射器的输入信号的相位变化。这样可以计算发射器相对于接收器的相对运动。与惯性传感系统一样,相位差系统可能会遭受累积误差的影响,因此会受到漂移的影响,但由于相位可以连续测量,因此它们能够产生高数据速率
- 直接磁场传感定位使用已知磁场来推导方向或位置:简单的指南针使用地球磁场来了解其在两个方向上的方向。测斜仪使用地球引力场来了解其在剩余第三方向的方向。用于定位的磁场不一定来自自然界。由彼此垂直放置的三个电磁铁组成的系统就可以定义空间
- 光学定位系统基于光学元件,例如全站仪,是一种用于测量和建筑施工的电子/光学仪器。它是一种电子传输经纬仪,集成了电子距离测量(EDM),用于测量垂直和水平角度以及从仪器到特定点的斜率距离,以及用于收集数据和执行三角测量计算的车载计算机
- 磁性定位利用室内设置中典型的磁场异常,将其用作独特的场所识别特征。智能手机的磁性传感器数据,用于无线定位建筑物内的物体或人。磁性定位似乎是最完整和最具成本效益的。它提供了准确性,没有任何硬件要求,并且总拥有成本相对较低。GiPStech通过地磁和惯性算法的智能集成开发了专有的室内定位解决方案
- 混合定位:每种技术都有其优缺点,因此大多数系统使用多种技术。基于相对位置变化的系统(如惯性系统)需要针对具有绝对位置测量的系统进行定期校准。结合两种或多种技术的系统称为混合定位系统
室内定位技术
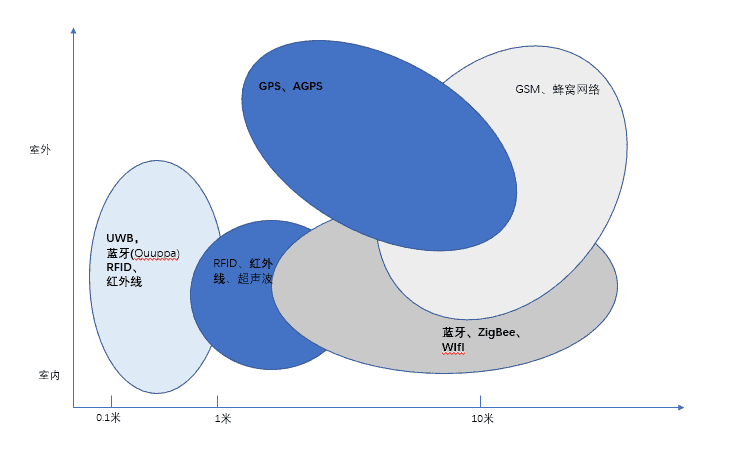
室内定位系统(indoor positioning system —IPS)是一种系统网络,用于定位GPS、北斗和其他卫星技术缺乏精度或完全失败的人或物体,尤其在多层建筑物、商场、火车站、机场、街道,停车场和地下的位置;由于公共网络的信号微弱或没有,很难实施相关的定位信息。行业内虽然有几种成功实施的系统,但没有室内定位的统的标准;相反,每个装置都是根据空间尺寸、建筑材料、用户数量、功耗、精度需求和预算限制量身定制的。
各种各样的技术和设备用于提供室内定位,从已经部署的系统重新配置设备,如智能手机,WiFi和蓝牙天线,数码相机和时钟;特制化的系统,其中的信标被放置在整个定制化和定义的空间中。光、无线电波、磁场、声学信号和行为分析都用于室内定位系统网络,例如,VBOX的VIPS系统使用UWB的通信技术可以达到很高的位置精度;这种精度与支持RTK的GNSS接收器相当,可以在室外达到2厘米的精度。室内定位系统使用不同的技术,包括测量到附近锚点节点(具有已知固定位置的节点,例如WiFi / LiFi接入点,蓝牙信标或UWB超宽带信标),磁性定位,航位推算。它们要么主动定位移动设备和标签,要么提供环境位置或环境环境,以便设备被感知。室内定位的特征导致了设计碎片化,系统利用各种光学、无线电、甚至声学技术来完成需求的设计。
其实任何无线技术都可以用于室内定位,许多不同的系统利用现有的无线基础设施进行室内定位;定位的精度依赖于设备的投入和密度。无线电室内定位的技术包含,ZigBee定位、Lora定位、蓝牙定位、超宽带UWB定位、WIFI定位,请参考站内文档:室内定位技术有哪几种。
UWB历史
- 2002年,WiMdia联盟推出了第一个UWB规范,美国联邦通信委员会(FCC) 允许在雷达、公共安全和数据通信应用中免许可使用UWB系统。
- 2005年,由欧洲国际计算机制造商协会(ECMA)公布ECMA-368标准,高速率超宽带PHY和MAC标准,多频带正交频分调制(MB-OFDM)方案
- 2007年,IEEE 802.15.4a,从OFDM发展为脉冲无线电(UWB IR)
- 2012年,IEEE 802.15.4f标准发布,提供了LRP UWB PHY
- 2015年,IEEE 802.15.4-2015定义了2个UWB PHY,HRP Ch. 16(802.15.4a/802.15.4-2011) 和 LRP Ch. 19(802.15.4f-2012)
- 2017年ETSI 成立了一个工作组TGUWB,主要从事短距离设备(SRD)射频标准的研究和开发,包括使用UWB技术的短距离设备
- 2018年,UWB联盟成立,致力于UWB全球推广和普及,包括RF频谱和互操作性问题
- 2019年,FiRa联盟成立,基于IEEE 802.15.4/4z标准,增强了UWB PHY & MAC
- 2020年,IEEE 802.15.4z发布, 增强了UWB PHY和相关测距技术
UWB特征
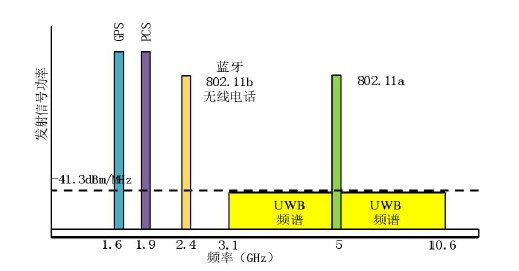
UWB是一种在宽带宽(>500 MHz)上传输信息的技术。它允许传输大量信号能量,但是不会干扰同频段的传统窄带和载波信号的传输。许多国家的监管允许有效利用无线电带宽,并实现高数据速率个人局域网(PAN)无线连接,更远距离低数据速率应用以及雷达和成像系统,与现有通信系统透明共存。
UWB(Ultra-wideband,超宽带)以前被称为脉冲无线电,但FCC和国际电信联盟无线电通信部门(ITU-R)目前将UWB定义为发射信号带宽超过500 MHz或中心频率20%的天线传输。因此,基于脉冲的系统-其中每个发射脉冲占用UWB带宽(或至少500 MHz的窄带载波的聚合;例如,正交频分复用(OFDM))可以根据规则访问UWB频谱。
传统无线电传输和UWB之间的显着区别在于,传统系统通过改变正弦波的功率电平,频率和/或相位来传输信息。UWB通过在特定的时间间隔内产生无线电能量并占用大带宽来传输信息,从而实现脉冲位置或时间调制。还可以通过编码脉冲的极性,其幅度和/或使用正交脉冲来调制UWB信号(脉冲)上的信息。UWB脉冲可以以相对较低的脉冲速率偶尔发送,以支持时间或位置调制,但也可以以高达UWB脉冲带宽相反的速率发送。脉冲UWB系统已经使用连续的UWB脉冲流(连续脉冲UWB或C-UWB)在通道脉冲速率下以超过每秒13亿个脉冲的速度进行演示,同时支持超过675 Mbit/s的前向纠错编码数据速率
UWB芯片供应商
全球现在仅仅有少部门的芯片供应商可以批量提供UWB芯片,中国大陆也有一些企业宣布会推出相关芯片,例如成都精位科技、北京清研讯科、郑州联睿电子、广州浩云科技、全迹科技、南京唐恩科技、上海环旭电子、上海仁微电子、南京沃旭、翰巍微电子、优智联、纽瑞芯、深圳润安、长沙驰芯、杭州新华三;但大部分是模组,芯片级别的产品仍没有看到市场的量产。
| 供应商 | 产品型号 | 标准 | 频段 | 发布日期 |
| Microchip | ATA8350 | LRP | 6.2-7.8GHz | Feb 2021 |
| Microchip | ATA8352 | LRP | 6.2-8.3GHz | Feb 2021 |
| NXP | NCJ29D5 | HRP | 6–8.5 GHz | Nov 12, 2019 |
| NXP | SR100T | HRP | 6–9 GHz | Sept 17, 2019 |
| Apple Inc. | U1 | HRP | 6–8.5 GHz | Sept 11, 2019 |
| Qorvo | DW1000 | HRP | 3.5–6.5 GHz | Nov 7, 2013 |
| Qorvo | DW3000 | HRP | 6–8.5 GHz | Jan 2019 |
| 3 dB | 3DB6830 | LRP | 6–8 GHz | |
| CEVA | RivieraWaves UWB | HRP | 3.1–10.6 GHz depending on radio | Jun 24, 2021 |
UWB定位算法和技术
基于信号强度,RSSI(signal strength indicator)
无线信号在特定信道传播时,其信号强度遵从一定的衰减模型,因此RSSI的定位算法就是通过测量无线信号的脉冲信号的场强,依靠信道衰减模型,计算移动标签和基站之间的距离。由于发送节点具备通信能力,因此RSSI是一种低功率,低成本的测距技术,理想环境下,RSSI表现非常好的特性;但是室内环境下,阴影衰落(来自信号传输途径上的障碍物)和多径效应(电磁波经不同路径传播后,各分量场到达接收端时间不同,按各自相位相互叠加而造成干扰,使得原来的信号失真)等影响,将会产生较大误差
基于到达时间,TOA(time of arriaal)
一种基于测量电磁波传播时间的定位方案,其精度主要依赖于两点:
1、基站和标签之间的时间同步程度;
2、时间分辨率。时间同步程度越高、时间分辨率越高,定位精度越高。
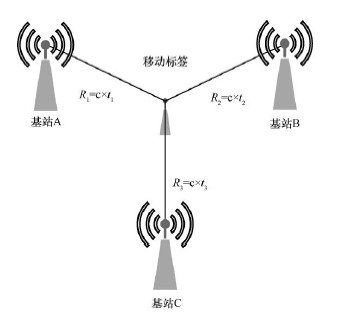
基于到达时间差,TDOA(time difference of arrival)
又称“双曲线定位方案”,是TOA 定位方案的改进型。标签发出电磁波信号,根据这个信号到不同基站的时间差来确定标签的位置。该方案只需要对基站的时间进行同步,提高了可行性,是目前市场上运用较多的
方案。

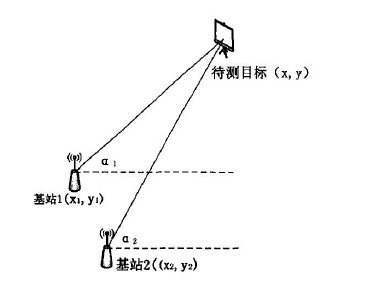
基于到达方向,DOA(direction of arriavl),也可以称之为:AOA(angle of arrival)
基于角度的AOA定位方式是基站通过天线阵列测出无线信号的入射位置,以此来计算标签与基站之间的角度,最后用三角测量法得出标签的坐标。但此方法对无线射频信号的方向和角度计算要求非常之高,尤其是需要采取较强的指向性天线或天线阵列
飞行时间方法,TOF(TIME OF FLIGHT)
是一种双向测距技术,通过测量信号在发送方和接收方之间的飞行时间来计算距离。其定位方法本质上与TOA 是一样的,只是TOF 定位方法不需要设备之间进行时间同步,但设备本身的时钟精度会对最终的结果产生影响
UWB定位常见应用场景
室内定位的主要消费者优势是将位置感知移动计算扩展到室内,涉及场景越来越广泛,这些依赖于芯片的成本逐渐降低,相关的模组提供商越来越多,应用类的整合需求越来越广泛。以下是大致的一些场景应用:
- 为视障人士提供的辅助功能;视力有障碍的人员可以通过UWB进行精确定位然后通过后台信号给予声音的指示,保障这些人员的安全
- 增强现实,主要应用于游戏类和商品交易类的虚拟现实应用
- 校园内部的人员定位,资产定位;可以与校园卡整合在一起使用
- 博物馆相关导览系统,让游客接触到相关的产品后立刻可以给予介绍
- 购物中心,包括大卖场,为客户提供准确定位信息
- 仓库管理,物流管理,对物资和资产进行精确定位,尤其是一些危险物品的管控
- 工厂在生产线中,对人员和周转箱的管理,通过自动跟踪人员或资产在流程中的进度并为其添加时间戳例如跟踪工具箱或工人的等待时间、在流程中以及生产过程的总时间,帮助流程改进工作让流程更加顺畅和便于改善流程
- 机场、巴士站、火车站和地铁站,这些场所的管理人员需要精确定位,方便快速反馈;还有如果通过UWB与手机捆绑,然后可以实现无感支付,不需要拿出手机来刷车站的闸机就可以进入。因为它可以设置在很近的范围内进行识别。
- 停车场,尤其是地下停车场的位置,仍司机及时找到车辆
- 定向广告,由于UWB可以识别短距离的精确位置,对于定向广告容易取得较大的效果
- 监狱及劳教区域,对于犯人的监管,如果犯人离开区域立刻报警或给予警示
- 医院:医院的医疗设备要保证在正确的地方,或被人使用后可以及时得以恢复到原状;还有在婴儿离开医院分娩中心边界时发出警报或警报,防止儿童被绑架
- 酒店或餐厅,对客户可以精确服务
- 体育,运动员的训练需要精确的数据指标,通过UWB可以对运动员的运动过程进行精密的计算,以此作为改善的数据基础
- 游船:为保障游客的安全,有一些区域不能让游客进入,一旦进入马上报警
- 室内机器人:机器人吸尘器、机器人熨衣服;机器人烤面包机
- 旅游,在旅游过程中,经常有游客跟不上导游,导游每到一个地方就会清点人数,而如果给每一位游客一个标签,导游只要刷新一下接收的信号就知道那个游客不在或没有在进度内
- 游乐园;游乐场管理人员想了解每个节目附近的人流量是多少,这样就可以侧重的发布一些信息以进行一些分流。
- 车载设备:UWB 技术与汽车进行交互,可以识别用户何时接近汽车、协助解锁车门、并控制何时启动汽车,同时充分利用UWB技术实现部分雷达探测功能,用于脚踏雷达、车内人员检测等,开后备箱更便捷,车内人员,尤其是婴幼儿更安全。
相关信息
- 美国电器与电子工程协会IEEE:是UWB标准802.15.4 的起草者
- 欧洲电信标准化协会ETSI:主要从事短距离设备(SRD)射频标准的研究和开发
- UWB联盟:2018年12月成立使UWB技术能成为一个开放的标准,主要针对传输层和网络层开展工作
- FiRa联盟:在2019年成立,目标与UWB联盟很像,旨在推动各个产品间的互联和互通,即互操作性
- APPLE的U1芯片
- Apple Watch Series 6 Features U1 Chip for Ultra Wideband
- NXP的UWB芯片应用于小米手机
- NXP:NCJ29D5: 用于汽车应用的UWB IC
- iPhone 11’s U1 Chip Uses 6Hz & 8GHz Frequencies In UWB Spectrum
- NXP推出UWB芯片组
世电相关产品








内容审核: