





概述
在与其它室内定位技术,例如UWB、WIFI、Zigbee、蓝牙等的对比中,磁定位不需要保持传感器接收和信号源发送之间的视线。因此,如果需要穿透墙壁,使用磁场是非常方便的方法,并且是探测深埋地下的结构的唯一方法。不同的方法包括从小于1立方米体积的手术专用系统(以毫米级精度运行)到大覆盖范围、低精度指纹识别系统。
磁场可以由永磁体或使用交流(AC)或脉冲直流(DC)场的线圈产生。电磁场可以在它们的电场和磁场的组合使用中用于定位,电磁场的两个来源是产生电场的静电荷和产生磁场的电流,振荡电荷产生电场和磁场。
相关历史
1600年,威廉·吉尔伯特(William Gilbert)出版了他的《磁铁,磁力物质,以及大磁铁地球》,在这部作品中,他描述了他用他的模型地球进行的许多实验。从他的实验中,他得出结论,地球本身是磁性的,这就是指南针指向北方的原因(以前,有些人认为是北极星(北极星)或北极上的一个大磁岛吸引了指南针)。
对电与磁之间关系的理解始于1819年哥本哈根大学教授汉斯·克里斯蒂安·奥斯特德(Hans Christian Ørsted)的工作,他通过罗盘针在电线附近意外抖动而发现电流可以产生磁场。随后进行了其他几次实验,安德烈-玛丽·安培(André-Marie Ampère)于1820年发现,在封闭路径中循环的磁场与流过被路径包围的表面的电流有关。詹姆斯·克拉克·麦克斯韦(James Clerk Maxwell)将这些见解综合并扩展到麦克斯韦方程组,将电学,磁学和光学统一到电磁学领域。
1905年,阿尔伯特·爱因斯坦使用这些定律来激发他的狭义相对论,要求这些定律在所有惯性参考系中都成立。电磁学继续发展到21世纪,被纳入更基本的规范理论,量子电动力学,电弱理论,最后是标准模型
磁性定位的几种系统
天线近场的系统
近场电磁测距(NFER-The Near‐Field Electromagnetic Ranging)利用无线电波的特性,其中近场包括天线,或者更一般地说,任何半径约为辐射波长1/6的电磁辐射源。在NFER,与小型发射机天线的距离是从电磁场的电场和磁场分量之间的相位关系推导出来的。接收器单元必须能够分别接收两个信号分量并比较它们的相位。靠近天线,这些元件的最大相位差为90°,因为相位差随着到天线的距离而减小,所以它可以用于在到天线的一定接近度内的范围确定。作为一个主要优点,NFER不需要同步或信号调制;其次,如果使用1 MHz左右的低频,信号有可能穿透墙壁。另一方面,低RF频率的使用需要大的接收器单元,因为有效的接收器天线需要在四分之一波长的尺寸内。
电流磁场的系统
磁场由磁性材料或电流产生。一种定位系统专门利用磁场的强度和方向。磁场有两个相关但分开处理的量度:磁场强度H (A/m)和磁通量密度B(特斯拉)。这两个量的关系是:
B=uH
其中u是一个依赖于材料的参数,称为渗透率。磁导率不仅随材料的电导率而变化,还随温度和磁场频率而变化,H和B是成比例的。
交流磁性的系统
与基于使用脉冲DC技术的线圈的系统不同,基于AC(交流电)的磁跟踪系统受地球磁场和来自电子设备的人工磁场的影响较小。
永久磁铁的系统
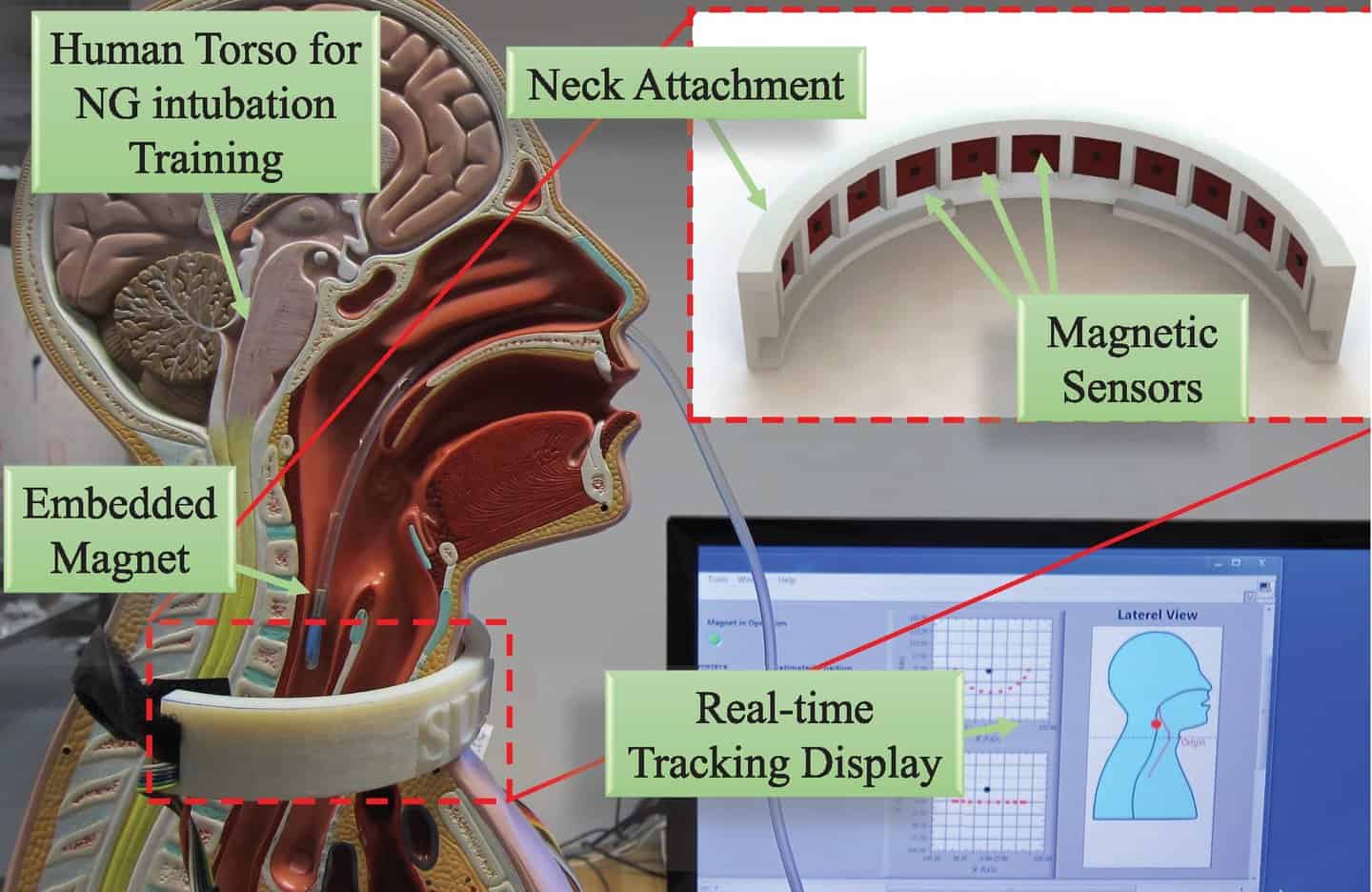
典型的系统由多个静态磁传感器组成,这些传感器测量移动磁体的磁通量密度。在已知位置的多个静态永磁体可以用于定位移动磁场传感器。当前的方法表明测量体积为1立方米,这将该方法限制在近距离使用,例如医疗应用。使用永磁体定位的一个主要挑战来自磁场的复杂性。数学模型包括高阶非线性方程,该方程为位置解创建了具有多个局部最优值的多峰目标函数。
使用磁性指纹的系统
磁性指纹的想法来自动物,它们通过地球磁场的局部异常来确定自己的位置。同样,在建筑物中,每个位置都有其独特的磁通量密度特征。这些空间波动来自自然和人为因素,如金属建筑材料、电力系统和工业设备。磁场的异常在空间中具有足够的可变性,可以被磁力计检测到。在假设建筑物内的磁场近似静态的情况下,可以应用指纹方法。在设置阶段获取房间的磁地图,并且通过将当前通量密度与存储在数据库中的通量密度值进行比较来确定当前位置
磁性定位的应用领域
磁性定位是一种IPS(室内定位)解决方案,它利用室内设置中的磁场异常,将其用作独特的场所识别特征。基于磁异常的定位的第一次引用可以追溯到1970年的军事应用(一种制导系统,该系统采用位于平面上的三个全场磁力计传感器,并围绕运动轴等角分布)。使用磁场异常进行室内定位在2000年初首次出现在与机器人相关的论文中。最近的应用可以使用来自智能手机的磁性传感器数据,用于无线定位建筑物内的物体或人。
目前关于室内定位没有一个统一的标准,但是磁性定位似乎是最完整和最具成本效益的。它提供了准确性,没有任何硬件要求,并且总拥有成本相对较低。磁性定位用于许多室内定位应用,例如工业,医疗和物联网,因为它没有视线需求,多路径和衰落,发射器和接收器的低成本以及线圈和磁性传感器设置的简单开发相关的优势,因此在短距离应用中,与超声波、激光或射频相比,该技术可能具有一些优势,新加坡科技与设计大学的教授SHAOHUI FOONG有一篇关于医疗的文章,介绍了磁性定位用于医疗项目。
根据Opus Research的说法,磁性定位将成为一种“基础”的室内定位技术。然而,在固定所需的精度和能量约束的情况下,基于磁性测量的定位系统的优化设计取决于几个因素:锚的尺寸,数量和最佳位置,传感器元件引起的不确定性以及数据采集系统。
根据相关研究报告,全球在医疗行业的磁定位系统市场,预计在预测期内(即2022年~2030年)以强劲的复合年增长率增长,从而获得可观的收入。市场的增长主要归因于世界各地患者对微创手术的需求不断增长,加上医生对磁性定位系统的使用不断升级,以正确导航内部器官。与此同时,骨关节炎和脑癌等慢性疾病的患病率增加也有望在不久的将来推动市场增长。
相关公司
GiPStech
成立于2014年,他们能够实现一个室内定位平台,该平台基于建筑物地磁场的指纹识别和先进的传感器融合,能够在没有任何基础设施的情况下精确定位设备及其用户。此外,该平台还能够补偿局部磁场变化的大多数已知问题。
Indoor Atlas
成立于2012年,在加利福尼亚州山景城和芬兰奥卢设有双总部。他们研究建筑物具有由地球磁场产生的独特磁性景观,因此使用建筑物内的磁场作为地图来精确跟踪设备的位置。
内容审核: