








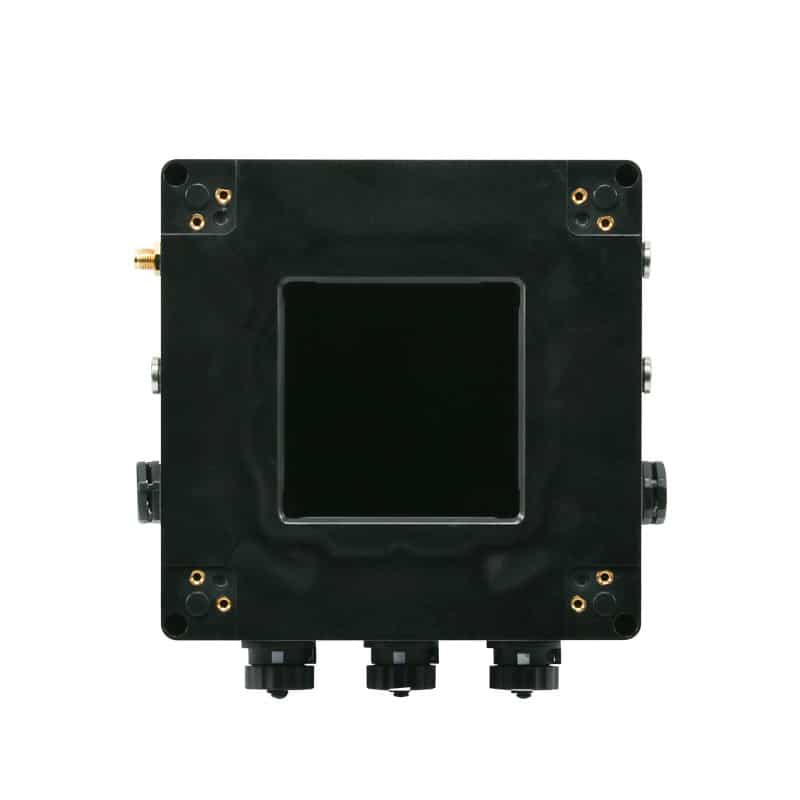



WE-UG230是海南世电科技有限公司基于UWB定位技术研究开发的一款车载定位标签,支持IEEE802.15.4aUWB物理层,支持433MHz和BLE技术,主要用于各种物联网应用,比较典型的是车载标签人车防撞等应用。同时在短距离上增加了短距离低功耗辅助定位技术。
应用领域
比较典型的应用可以是车载标签,人车防撞等应用
室内定位概述
当今社会中,信息化,数字化无处不在,无线通信技术和导航测距技术已经非常成功的应用到各个领域之中,我们生活的各个方面都离不开这些技术的应用,例如我们到一个地方扫描附近的商场、餐厅,都会与我们所处在的位置形成交叉检测,还比如最近疫情期间如果要到公共场所,不仅仅做好个人防护,戴好口罩外,还需要去扫描要去的场所的二维码,如此我们的相关核算检疫信息及行程信息被提炼出来并与我们所取场所的位置形成绑定关系,相当于我们到过这个地方。因此位置服务已经成为我们日常生活的一个很重要的部分
随着无线传感网络的日益发展,关于室内定位的技术手段也都取得了突飞猛进的成果,尤其是ZIGBEE定位、WIFI定位、BLUETOOTH定位、RFID定位、UWB定位在室内定位领域的运用已经非常广泛
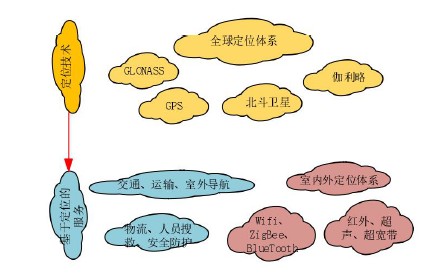
室外定位技术,全球定位系统(GPS)已经应用到我们生活的方方面面,尤其是我们驾驶汽车已经离不开导航,20几年前刚到上海的时候我开车往往在副驾驶会有一个人帮我拿着地图做指挥,以避免走错道路,现在这样的导航方式是当时几乎无法想象的方式,我们公司代理的瑞士品牌UBLOX是这个产业模块市场的先驱,我们每年都会销售数百万个模块产品以应用于各个领域,尤其自2019年其推出F9P这个划时代的产品;由于这个产品的精度可以到达米级,价格可以到1000元人民币以内,自问世之初就获得了大量客户的追捧和响应,应用的领域从汽车、工程机械、除草机、无人机,每年就我们一家代理的出货数量都非常可观,我们感受到定位市场的巨大潜能。但是人们还有很大一部分时间需要在室内处理定位的信息,而GPS运用到室内环境会出现很多问题,室内环境的复杂度远远的高于室外,卫星信号在室内会面临到各种干扰,导致信号反射、折射或被吸收掉,因此无法用GPS在室内进行准确的定位。而对室内定位的需求越来越多,需求精度越来越高;由于大型商场越来越多,停车场也越来越大,而人们期望可以找到所需的商场或自己的车辆就需要室内定位技术的支持;大型仓库往往与ERP配套进行,但有时候货物的寻找往往需要精确定位;还有一些危险场所,需要设备精确的位置进行处理,尤其是一些安全事故的救援活动,需要精确的位置来规划路线来找出被困的人员或设备;还有一些智能化的车间需要检测各个设备的位置,以便于快快速的做一些处理;还有一些保密单位,不期望某一类人进入,会设置一些警戒区域,一旦某类人靠近或穿越则会报警;大型幼儿园或中小学对儿童的安全管控,不安全的地方都需要做一些措施来保障安全可控。所以室内定位技术的应用将势在必行
位置信息应用最广泛的几种方法
基于信号强度,RSSI(signal strength indicator)
无线信号在特定信道传播时,其信号强度遵从一定的衰减模型,因此RSSI的定位算法就是通过测量无线信号的脉冲信号的场强,依靠信道衰减模型,计算移动标签和基站之间的距离。由于发送节点具备通信能力,因此RSSI是一种低功率,低成本的测距技术,理想环境下,RSSI表现非常好的特性;但是室内环境下,阴影衰落(来自信号传输途径上的障碍物)和多径效应(电磁波经不同路径传播后,各分量场到达接收端时间不同,按各自相位相互叠加而造成干扰,使得原来的信号失真)等影响,将会产生较大误差
基于到达时间,TOA(time of arriaal)
(1) 一种基于测量电磁波传播时间的定位方案,其精度主要依赖于两点:1、
基站和标签之间的时间同步程度;2、时间分辨率。时间同步程度越高、
时间分辨率越高,定位精度越高。

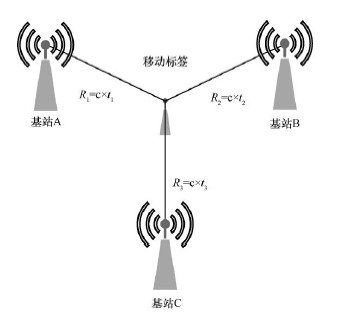
基于到达时间差,TDOA(time difference of arrival)
又称“双曲线定位方案”,是TOA 定位方案的改进型。标签发出电磁波
信号,根据这个信号到不同基站的时间差来确定标签的位置。该方案只
需要对基站的时间进行同步,提高了可行性,是目前市场上运用较多的
方案。
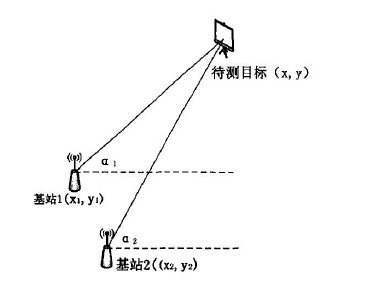
基于到达方向,DOA(direction of arriavl),也可以称之为:AOA(angle of arrival)
基于角度的AOA定位方式是基站通过天线阵列测出无线信号的入射位置,以此来计算标签与基站之间的角度,最后用三角测量法得出标签的坐标。但此方法对无线射频信号的方向和角度计算要求非常之高,尤其是需要采取较强的指向性天线或天线阵列
飞行时间方法,TOF(time of flight)
是一种双向测距技术,通过测量信号在发送方和接收方之间的飞行时间
来计算距离。其定位方法本质上与TOA 是一样的,只是TOF 定位方法不
需要设备之间进行时间同步,但设备本身的时钟精度会对最终的结果产
生影响
UWB定位技术
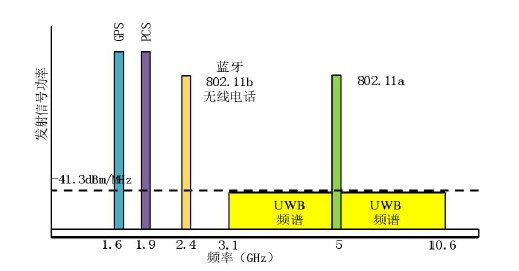
UWB技术是一种利用纳秒或微纳秒的正弦窄脉冲进行数据传输的无线载波通信技术,最早起源于20世纪60年代,利用超短基带脉冲进行通讯,用于军方的雷达探测;20世纪90年代,根据FCC对UWB的定义主要有以下几个特点:绝对带宽大于500MHZ或相对带宽大于20%,信号带宽在3.1-10.6GHZ,且中心频率大于2.5GHZ。最大发射功率不超过-41.3dBm/MHz.
从频谱来看,超宽带与窄带和宽带的区别在于它的频带更宽。
| 信号类型 | 信号带宽/中心频率 |
|---|---|
| 窄带 | 相对带宽≤1% |
| 宽带 | 1%≤相对带宽≤25% |
| 超宽带(UWB) | 相对带宽>25% 或者 中心频率>2.5GHZ |
| 定位技术 | 抗干扰性 | 定位精度 | 有效距离 | 穿透性 | 问题及局限 |
|---|---|---|---|---|---|
| WIFI | 弱 | 3-5米 | 30米 | 弱 | 信号稳定性差 |
| Bluetooth | 弱 | 2-3米 | 10米 | 中 | 通信距离,需要大量部署基站 |
| Zigbee | 强 | 1米 | 30米 | 强 | 通信距离短,精度低 |
| RFID | 弱 | 10厘米 | 30米 | 弱 | 容易被干扰,隐私性差 |
| UWB | 强 | 10厘米 | 200米 | 强 | 硬件成本高 |
| 红外线 | 弱 | 5-10米 | 10米 | 弱 | 直线视距,易干扰 |
UWB的信号特点主要是:纳秒级时间精度、较宽频段、低发射功率、无载波基带传输。由于UWB的发射功率受限,因此其传输距离也受到很多限制,在民用的短距离无线技术有IEEE802.11a,蓝牙,HomeRF,比较如下

常见的TDOA算法
- Fang算法:针对定位来说,简单的就是解算双曲线方程,将非线性的方程进行线性化处理,然后通过使方程的误差最小来得出待定位置目标的估计位置,此方式只适用于室内2D定位
- 最小二乘(Least square,LS)定位算法:简单快速,求出的不是最优解
- 加权最少二乘法(WLS)定位算法
- 查恩(Chan氏)定位算法:测量精度高的时候定位精度较好,但anchor位置出现偏差或测量精度一般的时候,定位性能下降较快
- CTK(Chan-Taylor-Kalman)定位算法;利用Chan算法获得定位标签的初始坐标,并以此作为Taylor的算法迭代的初始点,得到更准确的定位结果,最后利用改进卡尔曼剔除实验过程中的非视距,多径等环境造成的异常数据,使得定位更加准确
- 泰勒(Taylor)级数展开的定位算法,需要使用接近实际位置的初始值迭代运算,否则收敛缓慢,甚至由于初始值选择不当,无法定位
UWB定位系统误差因素
- 天线延迟误差:来源于芯片内部的发射和接收延迟
- 时钟误差:由于工艺、工作环境等问题,不同的设备存在一定的时钟频率不
- 一致问题:对于TOA、TDOA 等定位方法,时钟同步过程也会存在一定的误差
- 多径误差:接收端除接收正常信号外,还包含信号经过反射、折射带来的误差














