





概述
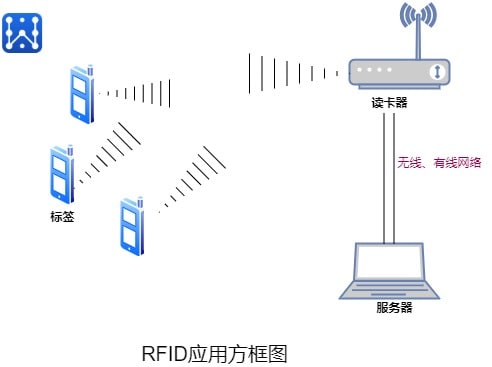
RFID(Radio Frequency IDentification 射频识别)技术广泛用于电子识别和跟踪。在众多室内定位技术中,由于其成本优势以及设备安装相对简单,使得其应用非常广泛。尤其在仓储和物流行业,RFID使得供应链上的自动库存和跟踪提供了实质性的优势。数据可以在RFID标签上存储和远程检索,从而实现设备和用户的实时识别,识别信息与位置相关联,RFID的使用将得到极大的优化。其工作原理相对简单,标签进入磁场后,接收解读器发出的射频信号,凭借感应电流所获得的能量发送出存储在芯片中的产品信息(PassiveTag,无源标签或被动标签),或者主动发送某一频率的信号(Active Tag,有源标签或主动标签);解读器读取信息并解码后,送至中央信息系统进行有关数据处理。
RFID的历史
1945年,莱昂·特雷门(Leon Theremin)发明了“Thing”,这是苏联的一种监听设备,它通过添加的音频信息重新传输无线电波。声波振动振膜,这略微改变了谐振器的形状,从而调制了反射的射频。尽管该设备是隐蔽的监听设备,而不是识别标签,但它被认为是RFID的前身,它是无源的,被来自外部源的电磁波所激活。类似的技术,如识别朋友或敌人的应答器,在第二次世界大战中被盟军和德国经常用于识别飞机是友好还是敌对,这是大多数动力飞机仍在使用的应答器。
探索RFID的早期工作是Harry Stockman在1948年发表的具有里程碑意义的论文,他预测“在解决反射功率通信中剩余的基本问题之前,必须进行大量的研究和开发工作。
马里奥·卡杜洛(Mario W. Cardullo)的设备于1973年1月23日获得专利,是现代RFID的第一个真正的祖先,因为它是一种带有记忆的无源无线电应答器。最初的设备是无源的,由询问信号供电,并于1971年向纽约港务局和其他潜在用户演示。它由一个具有16位存储器的应答器组成,用作收费设备。Cardullo的基本专利涵盖了使用RF,声音和光作为传输载体。1969年提交给投资者的原始商业计划显示了在运输(汽车车辆识别,自动收费系统,电子车牌,电子舱单,车辆路线,车辆性能监控),银行(电子支票簿,电子信用卡),安全(人员识别,自动门,监控)和医疗(识别,患者病史)中的用途。
1973年,Steven Depp,Alfred Koelle和Robert Frayman在洛斯阿拉莫斯国家实验室进行了反射功率(调制反向散射)RFID标签的早期演示,包括无源和半无源。便携式系统的工作频率为915 MHz,使用12位标签。这种技术被当今大多数超高频UHFID和微波RFID标签使用。
1983年,第一个与缩写RFID相关的专利被授予Charles Walton
Seco等人在2010年基于覆盖55个1600平方米房间的71个有源RFID标签,实现了1.5米的中值定位精度。用高斯过程描述空间相关性,在室内传播的RSSI信号中,与最小平方最小化相比,他们提高了30%的准确度。
Kimaldi 在2011年提供了一种基于微波波段静态有源读卡器的医院应用解决方案。这些标签可以作为腕带佩戴,也可以挂在钥匙圈上,用于门禁和个人监控
RFID系统的工作频率
RFID的信号不能干扰其它系统的正常运作,因此,它使用的频段是ISM(Industrial Scientific and Medical工业科学和医疗频段)频段。它的工作频率是:125kHz、133kHz、13.56MHz、27.12MHZ、433MHz、2.45GHz和5.8GHz等。
低频(LF:125–134.2 kHz 和 140–148.5 kHz)(LowFID)标签和高频(HF:13.56 MHz)(HighFID)标签无需许可即可在全球范围内使用。低频和高频电子标签的识别距离一般小于1米。
超高频(UHF:865-928 MHz)(超高FID或UHFID)标签不能在全球范围内使用,因为没有单一的全球标准,并且各国的法规也不同,识别距离可以达到10米以内。
微波电子标签的工作频率是2.45GHz和5.8GHz,常见的识别距离为4~6m,识别距离最大可达到10米以上
RFID技术标准
为了避免对人类和动物造成伤害,需要控制射频传输。许多组织已经为RFID设定了标准,包括国际标准化组织(ISO),国际电工委员会(IEC),ASTM国际,DASH7联盟和EPCglobal。一些特定的行业也制定了指导方针,包括金融服务技术联盟(FSTC)用于使用RFID跟踪IT资产,计算机技术行业协会CompTIA用于认证RFID工程师,以及国际航空公司运输协会IATA用于机场行李
每个国家/地区都可以为RFID标签的频率分配设置自己的规则,并且并非所有无线电频段在所有国家/地区都可用。这些频率被称为ISM频段(工业科学和医疗频段)。标签的返回信号可能仍会对其他无线电用户造成干扰
- ISO 11784/11785 :动物识别。使用 134.2 kHz。
- ISO 14223 . 动物的射频识别 . 高级应答器
- ISO/IEC 14443:该标准是针对高国际密度的流行HF(13.56 MHz)标准,根据ICAO 9303,该标准被用作支持RFID的护照的基础。允许移动设备充当RFID阅读器/应答器的近场通信标准也基于ISO / IEC 14443。
- ISO/IEC 15693:这也是一种流行的高频(13.56 MHz)标准,适用于广泛用于非接触式智能支付和信用卡的高FID。
- ISO/IEC 18000:信息技术-用于项目管理的射频识别:
- ISO/IEC 18092信息技术—系统间的电信和信息交换—近场通信—接口与协议(NFCIP-1)
- ISO 18185:这是使用433 MHz和2.4 GHz频率跟踪货物集装箱的电子密封或“电子密封”的行业标准。
- ISO/IEC 21481:信息技术—系统间的电信和信息交换—近场通信接口和协议 −2 (NFCIP-2)
- ASTMD7434:用于确定托盘化或单元化负载上无源射频识别(RFID)应答器性能的标准测试方法
- ASTMD7435:用于确定装载容器上无源射频识别(RFID)转发器性能的标准测试方法
- ASTMD7580:用于确定无源RFID应答器在均质托盘或单元化负载上的可读性的旋转拉伸包装方法的标准测试方法
- ISO 28560-2 :指定要在库中使用的编码标准和数据模型。
- 为了确保产品的全球互操作性,一些组织已经为RFID测试建立了额外的标准。这些标准包括一致性、性能和互操作性测试
无线网络定位原理
室内环境中的无线电传播会遇到许多问题,例如严重的多径、视线(LOS)路径、吸收、衍射和反射。由于不能非常精确地测量信号,一些文章中已经提出了几种室内定位算法。它们可以分为三类:距离判断、场景分析和接近方法。
距离估算
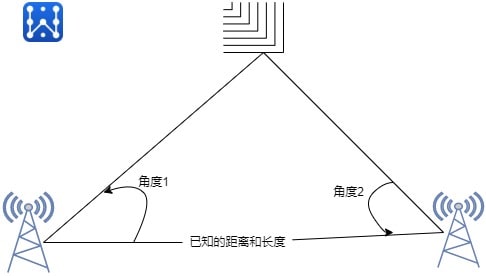
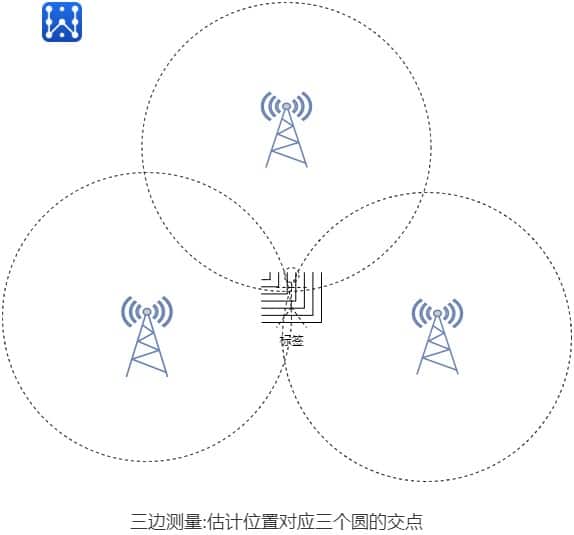
这一系列算法使用三角形的属性来估计目标的位置。图1所示的三角测量方法包括测量至少两个参考点的入射角(或到达角- AOA)。估计位置对应于由角度定义的线的交点。相反,图2所示的侧向方法通过估计目标与至少三个参考点的距离来估计目标的位置。距离测量技术使用接收信号强度(RSS)、到达时间(TOA)、到达时间差(TDOA)或接收信号相位(RSP)。
RSS:RSS(Received Signal Strength)发射信号强度的衰减是发射器和接收器之间距离的函数。因此,可以用至少三个参考点和相应的由于传播造成的信号路径损耗来定位目标。已经提出了几种经验和理论模型来将发射和接收信号强度之间的差异转化为距离估计。基于RSS的系统通常需要现场自适应,以减少室内环境中多径衰落和阴影的严重影响。
TOA:TOA(Time Of Arrival)参考点与目标之间的距离也与信号的传播时间成正比。基于TOA的系统需要至少三个不同的测量单元来执行二维定位的侧向测量。然而,它们还要求所有发射器和接收器精确同步,并且发射信号包括时间戳,以便准确评估行进的距离。如果有三个以上的参考点可用,可以使用最小二乘算法或其变体之一来最小化定位误差
TDOA:TDOA(Time Difference of Arrival,到达时间差)的原理在于利用目标发射的信号到达多个测量单元的时间差来确定目标发射器的相对位置。三个固定接收机给出两个TDOAs,从而提供一个交叉点,该交叉点是目标的估计位置。这种方法要求测量单位之间有精确的时间基准。像TOA一样,TDOA也有其他缺点。在室内环境中,LOS信道很少可用。此外,无线电传播经常遭受多径效应,从而影响信号的飞行时间。
RSP:RSP(Received Signal Phase)方法,也称为POA(Phase Of Arrival到达相位),使用延迟,表示为信号波长的分数,来估计距离。它要求发射机放置在特定的位置,并假设它们发射纯正弦信号。可以使用相位测量和与TOA或相位差测量相同的算法以及与TDOA相同的算法来执行定位。当应用于室内环境时,RSP方法的缺点是它非常需要LOS信号路径来限制定位误差。
AOA:AOA(Angle Of Arrival)包括计算几条方向线的交点,每条方向线都来自信标站或目标。至少需要用定向天线或天线阵列测量并转换成方向线的两个角度,才能找到目标的二维位置。然而,这种技术需要复杂和昂贵的设备,并且明显地受到阴影和多径反射的影响。
场景分析
场景分析方法由两个不同的步骤组成。首先,收集关于环境的信息(指纹)。然后,通过将在线测量结果与适当的指纹集进行匹配来估计目标的位置。通常,使用基于RSS的指纹识别。两种主要的基于指纹的技术是:KNN(k-nearest neighbor最近邻)也称为无线电地图和概率方法
kNN方法在于第一次在已知位置测量RSS,以便建立被称为无线电地图的RSS数据库。然后,在联机阶段,执行链接到目标的RSS测量,以在先前建立的信号空间中搜索k个最接近的匹配。最后对选择的邻居应用均方根误差原则,找出目标的估计位置。
概率方法中所述的问题是根据后验概率和贝叶斯公式,假设在线阶段有n个可能的位置和一个观察到的信号强度向量,来找到目标的位置。因此,选择概率最高的位置。一般来说,概率方法包括不同的阶段,如校准、主动学习、误差估计和历史跟踪
接近方法
室内环境中的最后一种定位技术是基于接近度的。这种方法依赖于天线的密集部署。当目标进入单个天线的无线电范围时,其位置被假定为与该接收机相同。当多于一个天线检测到目标时,该目标被认为与接收最强信号的天线位于同一位置。这种方法非常基本,也很容易实现。然而,精度非常依赖天线的数量级上。
使用RFID进行室内定位
与Wi-Fi定位,蓝牙低功耗(BLE)定位或超宽带(UWB)等定位技术相比,RFID跟踪由于其小于一米的高度限制范围而仅支持点定位。这意味着配备RFID标签的物体只能位于特定的检查点 – 无论RFID硬件读卡器已安装在哪里。因此,可能的应用包括用于物流中的访问控制、时间记录或库存控制的系统,但不包括在较大区域进行连续的路线跟踪或无缝跟踪。
无源RFID系统仅依靠电感耦合,因此不需要电池。感应耦合的原理允许标签从附近的RFID扫描器接收足够的RF波形式的能量,以将它们的代码发送回扫描器。无源标签可以基于id标记的参考网格应用于航路点导航,ID标记的位置可以从数据库中访问。使用无源RFID标签进行定位的优点是它们的小尺寸、高强度、相对便宜的安装和低维护需求,因为它们没有电池。因此,无源标签适合于地下嵌入建筑材料中。主要缺点是检测范围通常限制在2米以内,这需要密集部署标签。嵌入式标签的衰减随着频率而增加,例如,对于高于2.4 GHz的频率,混凝土嵌入式标签的应用是禁止的。低于100 MHz时,嵌入式标签的衰减较低,与自由空间的衰减相当,但低于300 MHz的频率不适合1米以上的读取范围,因为电感耦合是近场操作的一种现象。电磁波在混凝土中的渗透取决于集成金属纤维的使用、墙壁、地板和天花板的含水量以及无线电波的入射角度。
RFID系统的位置精度(即它在空间中定位物体的能力)将取决于您所指的RFID系统的类型。一般来说,大多数无源HF和UHF RFID系统不提供位置精度 – 它们告诉您标签已被特定读取器读取。由于您可以通过读卡器的唯一 ID(例如,停靠门 A)知道读取器的位置,因此您将知道标记位于该读卡器的读取区域中(即,标记的项目来自停靠门A)。
有一些无源UHF实时定位系统(RTLS)可以告诉您标签在3D空间中的位置。这些通常精确到一米立方体以内。这些无源系统可能每个覆盖 10 平方米,因此您需要多个读取器来覆盖 50 平方米。
基于RFID的有源RTLS具有使用电池广播信号的标签。在定义区域周围的读卡器对该信号进行三角测量并精确定位其位置。因为标签像手机一样发出信号,所以标签可以从更远的地方(1000米或更远)读取。与无源 RTLS 相比,您可以使用更少的读取器覆盖大面积区域,但标签的成本更高。有源 RTLS 的定位精度通常在 3 米以内
RFID定位技术的未来方向
就信息而言,普及网络具有潜在的丰富性。其组件的数量和多样性可用于增加RFID定位的准确性。因此,未来的本地化方法应考虑几个方面:
- 射频模型,大多数当前方法执行RSS测量。然而,他们通常使用为无线网络开发的模型。RFID传播有一些特殊性,应该在适当的RF模型中加以考虑。
- 读卡器冗余,针对密集部署读卡器的问题,应该更多地利用读卡器冗余来获得更多的数据
- 读卡器多样性,具有不同读取范围、天线和容量的读卡器的RFID网络中的定位可能是一种有趣且更现实的方法。
- 智能限制,可以从元信息中推导出来。例如,固定在同一包裹上的两个标签定义了它们之间的物理距离界限。
- 移动性,应考虑配备静态和移动读卡器的混合系统,以增加收集数据的数量和多样性。
可扩展性,应该仔细研究RFID定位技术的可扩展性,以便定义在给定周期内可以读取的标签数量;成功读取的比率、其对准确性的影响以及定位计算需要多长时间。
衡量标准,最后,RFID定位方案不能直接比较,因为它们基于不同的假设。需要精确衡量一个定位方案的标准是精确度和整个系统的成本。
内容审核: