





TOA,TDOA,RSSI定位技术详解
UWB技术概述
超宽频(UWB)技术是一种通过发射短脉冲信号覆盖广泛频谱的无线通讯技术。它能够在短距离内提供高资料速率和极高的定位精度。与传统的窄带系统不同,UWB 具有更强的抗干扰能力和更高的频宽利用效率。
IEEE 802.15.4a标准
IEEE 802.15.4a 标准是为提高 UWB 技术在无线个人区域网(WPAN)中的应用而设计的。它通过改进的测距和定位功能,提供更高的精度和可靠性,使其特别适用于室内定位应用。
室内定位原理
室内定位技术的核心在于精确地测量目标设备与已知位置之间的距离。UWB 技术使用以下三种主要测距方法:
📍 到达时间(Time of Arrival, TOA):
TOA 测量方法通过计算信号从发射器到接收器的传播时间来确定距离。由于 UWB 信号脉冲短且宽频特性,能够精确测量到达时间,从而实现厘米级的定位精度。
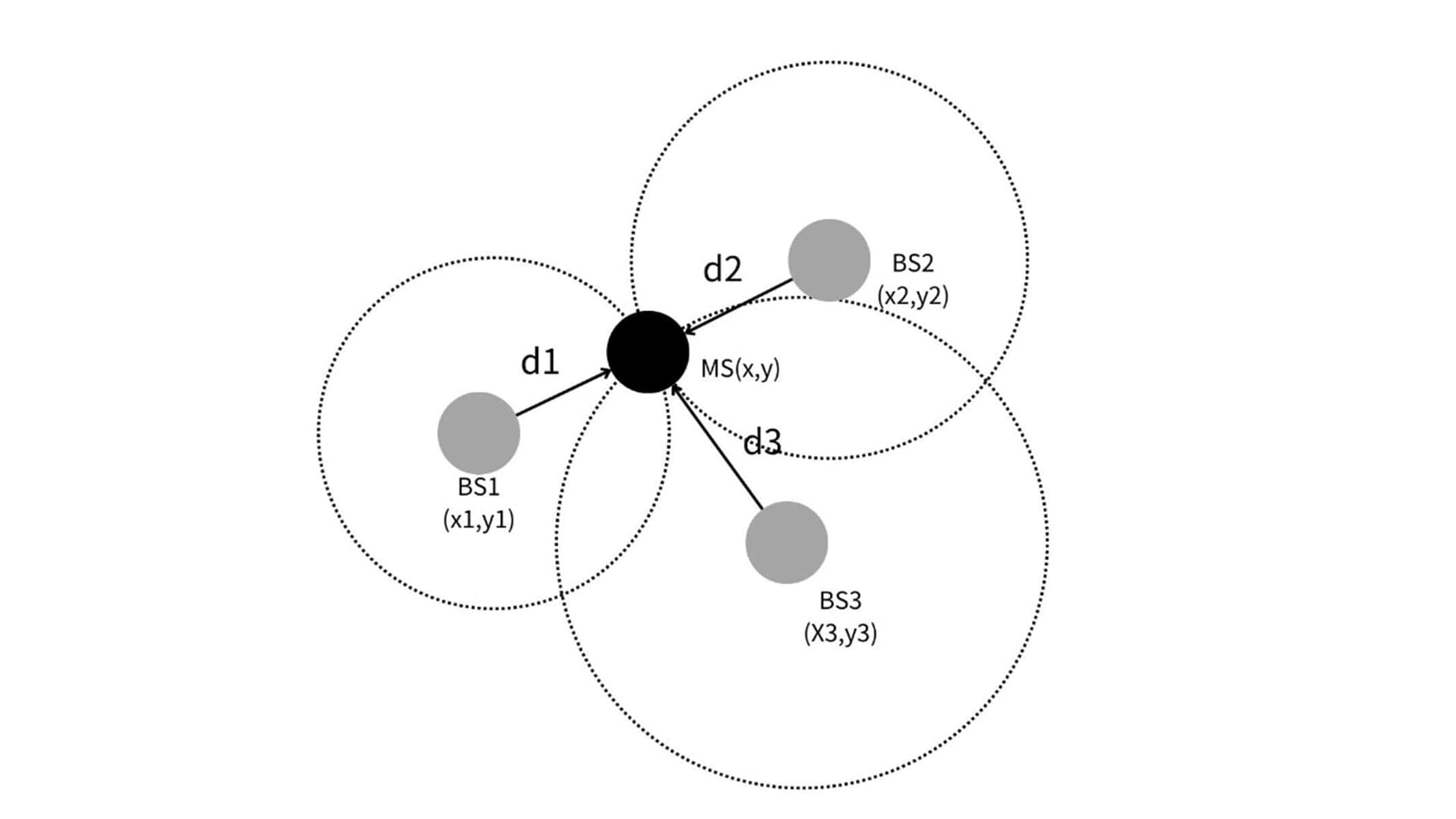
TOA 示意图
图示说明
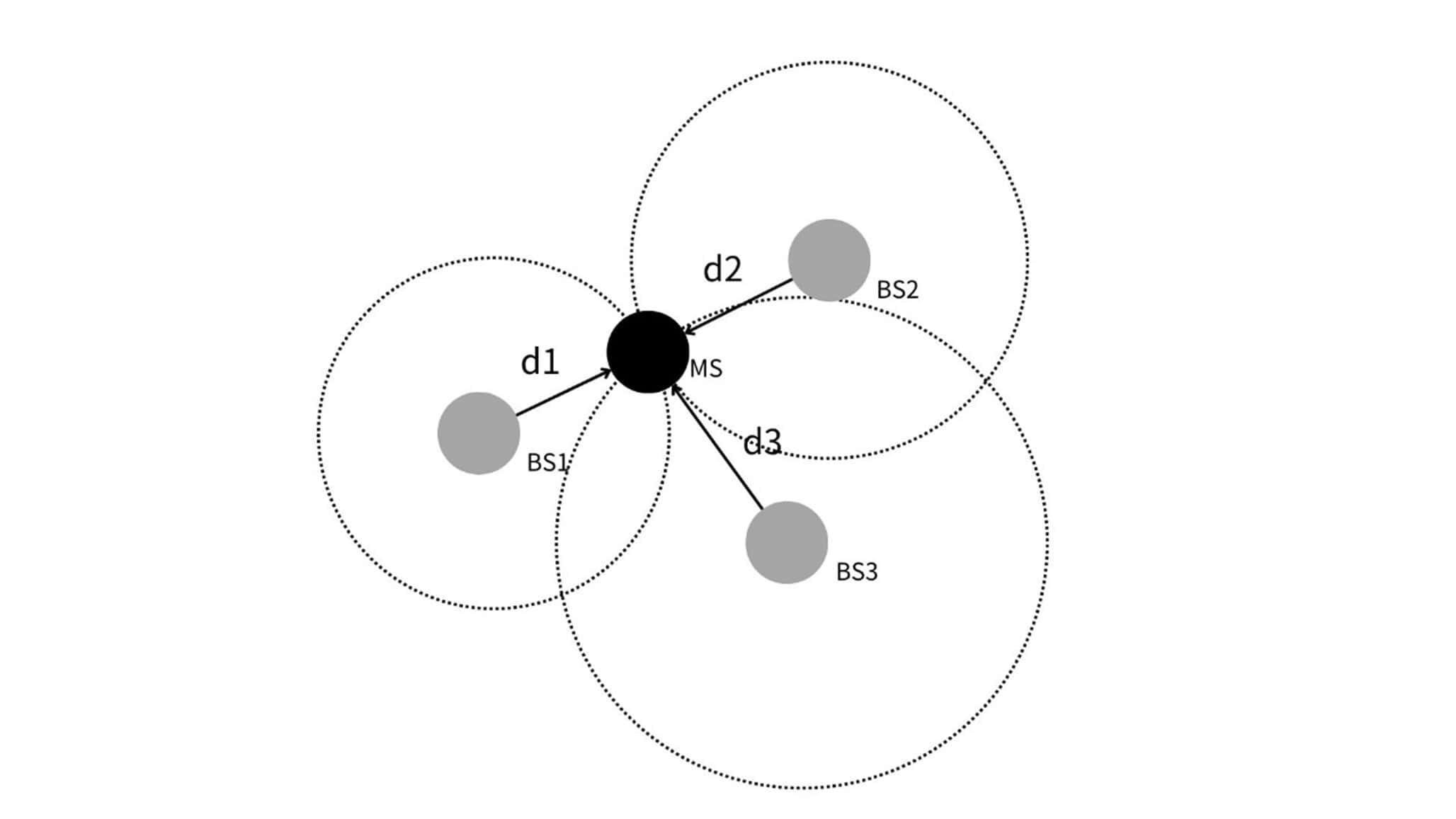
图中展示了基于 TOA 的定位计算方法,其中:
• MS(Mobile Station):移动站(或标签),需要确定其位置。
• BS1, BS2, BS3:基站,已知位置,用于接收信号。
• d1, d2, d3:从移动站到各个基站的距离。
定位计算步骤:
步骤一:信号传输与接收
- 移动站(MS)发送 UWB 信号。
- 三个基站(BS1, BS2, BS3)接收信号,并记录到达时间。
步骤二:定位方程式
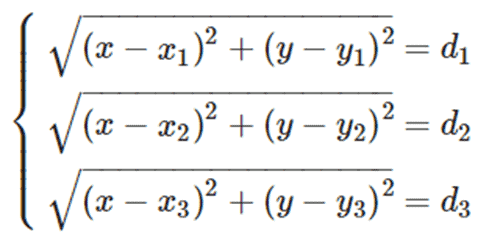
- 假设移动站的座标为 (𝑥,𝑦),基站 𝐵𝑆𝑖 的座标为 (𝑥𝑖,𝑦𝑖)。
- 信号从移动站到每个基站的传播時间 tit_iti 与信号传播速度 ccc(通常为光速)的乘积,给出移动站到每个基站的距离
 。這些距离满足下列方程:
。這些距离满足下列方程:
步骤三:
- 通过解上述方程组,可以得到移动站 (𝑥,𝑦)的座标。
数学解释
上述方程组表示以每个基站为圆心,以相应距离为半径的三个圆。这三个圆的交点即为移动站的位置。通过解方程组,可以精确确定移动站的位置。
结论
TOA(Time of Arrival)是另一种常用的定位技术,它基于信号从发射源到接收器的传播时间来确定位置。TOA 直接量测信号发射时刻与接收时刻之间的时间差异,从而计算出信号源与接收器之间的距离。因为信号传播速度已知(如无线电波在空气中的速度接近光速),通过这个时间差就可以估算出距离。
TOA 方法通常需要非常精确的时钟同步,因为任何在时间测量上的误差都会直接影响到距离的计算精度。这种方法在开阔的室外环境中使用较为广泛,如 GPS 技术就是基于 TOA 方法来实现全球定位的。相对于TDOA,TOA 需要的硬件和时钟同步要求更高,但它可以提供非常精准的定位信息。
📍 到达时间差(Time Difference of Arrival, TDOA):
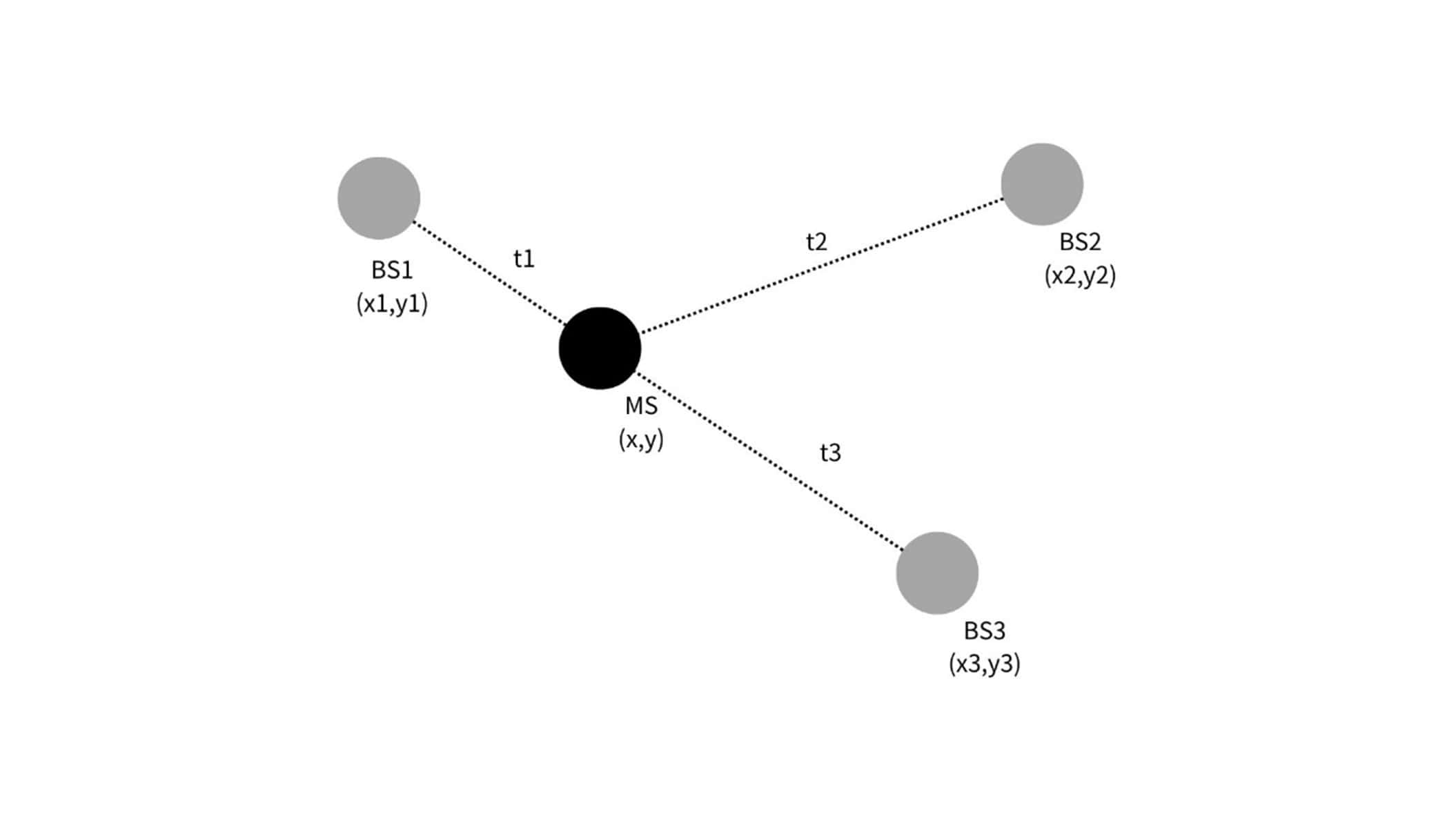
TDOA 示意图
概述
TDOA(Time Difference of Arrival)是一种利用信号到达不同接收器时间差进行定位的方法。与 TOA 不同,TDOA 不需要发射器和接收器之间的同步,只需要接收器之间的同步。这使得 TDOA 在实际应用中更加灵活和实用。
TDOA 定位原理
TDOA 定位技术通过测量信号从发射器到达不同接收器的时间差来计算发射器的位置。基本原理是:由于信号到达不同接收器的时间不同,这些时间差可以用于计算发射器与每个接收器之间的相对距离,从而确定发射器的位置。
详细步骤
- 信号发射与接收:
• 发射器(标签)发送UWB信号。
• 多个接收器(基站)接收到信号,并记录信号到达的时间。 - 计算到达时间差:
• 选择一个接收器作为参考点(通常选择最近的或信号最强的接收器)。
• 计算其他接收器与参考接收器之间的信号到达时间差。 - 构建时间差方程:
• 假设发射器的位置为 (𝑥,𝑦)。
底下为已知参数 ⇣
• 基站1、基站2、基站3的位置分别为 (𝑥1,𝑦1)、(𝑥2,𝑦2)和 (𝑥3,𝑦3)。
• 信号到达基站1、基站2、基站3的时间分别为 𝑡1、𝑡2和𝑡3。
• 参考基站的信号到达时间为 𝑡1,其他基站的信号到达时间差为 Δ𝑡𝑖𝑗=𝑡𝑖−𝑡𝑗。
• 信号传播速度为 𝑐=3×108 米/秒。 - 构建定位方程:
• 根据几何关系,构建以下方程: - 求解位置:
• 解上述方程组,求解出发射器的座标 (𝑥,𝑦)。

数学解释
上述方程组表示发射器与各接收器之间的距离差,通过这些距离差的几何关系,可以确定发射器的位置。这种方法利用了多个接收器之间的相对时间差,构建了一组非线性方程,通过求解这些方程,可以精确定位发射器的位置。
优点和应用
- 优点:
- 无需同步发射器和接收器: 仅需同步接收器,简化了系统实现。
- 高精度: 能够提供厘米级定位精度。
- 鲁棒性: 在复杂环境中依然表现出色,抗多路径干扰能力强。
- 应用场景:
- 智慧物流和仓储: 即时跟踪物品和设备的位置,优化物流和库存管理。
- 医疗监护: 跟踪患者和设备的位置,确保资源合理分配和患者安全。
- 智能建筑: 控制照明、空调和安防系统,根据人员位置提供个性化服务。
- 零售业: 分析客户行为,优化商品布局,并提供个性化的购物体验。
结论
TDOA 定位技术通过测量信号到达不同接收器的时间差,实现高精度的定位。其无需发射器和接收器之间的同步,简化了系统实现,适用于各种需要精确位置服务的应用场景。通过集成 TDOA 技术,企业可以提高运营效率,优化资源管理,并提供更好的用户体验。
📍 接收信号强度(Received Signal Strength, RSS):
RSSI 示意图
概述
RSSI(Received Signal Strength Indicator)是一种利用接收信号强度进行定位的技术。RSSI定位技术通过测量无线信号在接收点的强度来推断发射器到接收器的距离。由于信号强度通常与距离成反比,因此可以利用这种关係进行定位。
RSSI 定位的基本原理
RSSI定位技术基于以下假设:
• 无线信号在传播过程中会衰减,信号强度随著距离的增加而减弱。
• 通过测量接收信号的强度,并结合已知的信号传播模型,可以推算出发射器与接收器之间的距离。
详细步骤
- 信号传播模型 无线信号在自由空间中的传播可以用路径损耗模型来描述,常见的模型有自由空间路径损耗模型和对数距离路径损耗模型。
▸ 自由空间路径损耗模型:
其中:
- 𝑃𝐿(𝑑) 是距离为 𝑑 时的路径损耗(单位:dB)
- 𝑃𝐿(𝑑0) 是参考距离 𝑑0 处的路径损耗
- 𝑛 是路径损耗指数,通常在2到4之间
- 𝑑 是发射器到接收器的距离
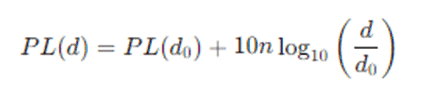
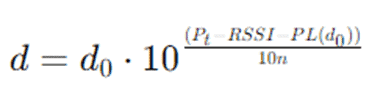
▸ 对数距离路径损耗模型:
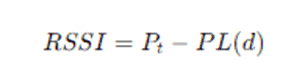
其中:
- 𝑅𝑆𝑆𝐼是接收信号强度(单位:dBm)
- 𝑃𝑡是发射功率(单位:dBm)
- 𝑃𝐿(𝑑)是路径损耗
- 测量RSSI 接收器接收到发射器发送的无线信号,并测量接收信号的强度(RSSI值)。
- 距离估算 根据测得的RSSI值和已知的信号传播模型,计算出发射器到接收器的距离。利用自由空间路径损耗模型,计算公式为:
多点测量和三边测量 为了提高定位精度,通常使用多个接收器进行 RSSI 测量。每个接收器根据测得的RSSI值计算出与发射器的距离。然后,通过三边测量法(Trilateration)计算发射器的位置。
举例说明
假设有三个接收器(AP1、AP2、AP3),其已知座标分别为 (𝑥1,𝑦1)、(𝑥2,𝑦2)、(𝑥3,𝑦3)发射器的位置为 (𝑥,𝑦),我们需要确定其位置。
- 测量RSSI值
• 接收器AP1测得的RSSI值为 𝑅𝑆𝑆𝐼1
• 接收器AP2测得的RSSI值为 𝑅𝑆𝑆𝐼2
• 接收器AP3测得的RSSI值为 𝑅𝑆𝑆𝐼3 - 估算距离
• 根据RSSI值和信号传播模型,估算发射器到各接收器的距离 𝑑1、𝑑2、𝑑3。 - 三边测量法计算位置
• 利用三边测量法,通过以下方程组计算发射器的位置 (𝑥,𝑦):


通过解这些方程,可以得到发射器的具体位置。
优点和局限性
- 优点:
- 实现简单:不需要复杂的硬体,只需接收器能够测量RSSI值。
- 成本低:可以利用现有的无线网路设备实现定位。
- 局限性:
- 精度较低:信号强度容易受到环境因素(如墙壁、障碍物、多路径效应等)的影响,导致定位精度不高。
- 适用范围有限:在复杂的室内环境中,RSSI值波动较大,影响定位效果。
应用场景
- 室内定位:如商场、医院、仓库等场所的人员和设备定位。
- 物联网:物联网设备的位置监控和管理。
- 资产跟踪:对重要资产进行即时跟踪和管理。
结论
RSSI 定位技术通过测量接收信号的强度来推算发射器的位置,具有实现简单、成本低等优点,但也存在精度较低的局限性。结合其他定位技术,如 TOA 和 TDOA,可以进一步提高定位精度,满足不同应用场景的需求。
UWB 室内定位系统组成
- 发射器(标签):
• 标签是附加在需要定位的物体上的小型设备,它周期性地发送 UWB 信号。标签可以是移动的,如安装在人员或设备上,也可以是固定的,用于标记特定位置。 - 接收器(基站):
• 基站安装在已知位置,用于接收来自标签的 UWB 信号。多个基站协同工作,通过测量信号的 TOA或 TDOA 来计算标签的位置。 - 定位引擎:
• 定位引擎是处理和计算资料的核心模组。它接收基站的测量资料,使用定位演算法计算出标签的具体位置,并将位置资讯传送给使用者应用程式。
室内定位演算法
UWB室内定位系统使用多种演算法来提高定位精度和可靠性:
- 三边测量法(Trilateration):
• 利用至少三个基站的测距资料,通过几何计算确定标签的位置。三边测量法需要高精度的TOA或TDOA测量,以提供准确的位置估算。 - 卡尔曼滤波(Kalman Filtering):
• 卡尔曼滤波是一种递回演算法,用于处理和预测动态系统的状态。它可以有效地减少测量杂讯,提高定位精度。 - 粒子滤波(Particle Filtering):
• 粒子滤波是一种基于统计的演算法,通过生成多个可能的状态(粒子)并根据测量更新这些状态来估算位置。它适用于非线性和非高斯分布的系统,能够提供更鲁棒的定位结果。
UWB 室内定位技术的应用场景
- 智慧物流和仓储:
• UWB 技术可以即时跟踪仓库内的物品和设备,优化库存管理和物流流程,提高运营效率。 - 医疗监护:
• 医院可以利用 UWB 定位技术跟踪患者、医护人员和设备的位置,确保资源合理分配和患者安全。 - 智能建筑:
• 在智慧建筑中,UWB 定位技术可以用于控制照明、空调和安防系统,根据人员位置提供个性化服务。 - 零售业:
• 零售商可以通过 UWB 定位技术分析客户行为,优化商品布局,并提供个性化的购物体验。
结论
UWB 使用 IEEE 802.15.4a 标准的室内定位技术提供了高精度、低功耗和强大性能的定位解决方案。通过准确的测距方法和先进的定位演算法,UWB 技术在多种应用场景中展现出色的性能。企业可以通过集成 UWB 室内定位技术,提高运营效率,优化资源管理,并提供更好的用户体验。

内容审核:翁圣杰 Mick Weng