





summarize
In cooperation with otherIndoor positioning technologyFor exampleUWB,WIFI,Zigbee,bluetoothIn contrast to et al, magnetic positioning does not require maintaining a line of sight between the sensor receiving and the source transmitting. Therefore, the use of magnetic fields is a very convenient method if wall penetration is required and is the only way to detect deeply buried structures. Different methods range from surgical-specific systems (operating at millimeter-level accuracy) with volumes smaller than 1 cubic meter to large-coverage, low-accuracy fingerprint identification systems.
Magnetic fields can be generated by permanent magnets or coils using alternating current (AC) or pulsed direct current (DC) fields. Electromagnetic fields can be used for localization in their combined use of electric and magnetic fields.The two sources of electromagnetic fields are electrostatic charges that generate electric fields and electric currents that generate magnetic fields.Oscillating charges generate electric and magnetic fields.
Relevant History
In 1600, William Gilbert published hisMagnets, Magnetic Matter, and the Great Magnet Earth.The(math.) genusIn this work he describes many experiments he conducted with his model Earth. From his experiments, he concluded that the earth itself was magnetic, and that this was the reason why the compass pointed north (previously, some believed that the North Star (Polaris) or a large magnetic island on the North Pole attracted the compass).
The understanding of the relationship between electricity and magnetism began in 1819 with the work of Hans Christian Ørsted, a professor at the University of Copenhagen, who discovered that an electric current could produce a magnetic field through the accidental jiggling of a compass needle near a wire. Several other experiments followed, and André-Marie Ampère discovered in 1820 that a magnetic field circulating in a closed path was related to an electric current flowing through a surface surrounded by the path. James Clerk Maxwell synthesized and extended these insights into Maxwell's system of equations, unifying electricity, magnetism, and optics into the field of electromagnetism.
In 1905, Albert Einstein used these laws to motivate his theory of special relativity, requiring that they hold in all inertial reference systems. Electromagnetism continued to evolve into the 21st century, being incorporated into more fundamental canonical theories, quantum electrodynamics, electroweak theory, and finally the Standard Model
Several systems for magnetic positioning
System for antenna near field
Near-Field Electromagnetic Ranging (NFER-The Near-Field Electromagnetic Ranging) utilizes the properties of radio waves, where the near-field includes the antenna, or more generally, any source of electromagnetic radiation with a radius of about 1/6 of the wavelength of the radiation. At NFER, the distance to a small transmitter antenna is derived from the phase relationship between the electric and magnetic field components of the electromagnetic field. The receiver unit must be able to receive the two signal components separately and compare their phases. Close to the antenna, these components have a maximum phase difference of 90°, and since the phase difference decreases with distance to the antenna, it can be used for range determination within a certain proximity to the antenna. As a major advantage, NFER does not require synchronization or signal modulation; secondly, if low frequencies around 1 MHz are used, it is possible for the signal to penetrate walls. On the other hand, the use of low RF frequencies requires large receiver units, since an effective receiver antenna needs to be within a quarter-wavelength dimension.
Systems of current magnetic fields
Magnetic fields are generated by magnetic materials or electric currents. One type of positioning system specifically utilizes the strength and direction of the magnetic field. There are two related but separately treated measures of magnetic field: the magnetic field strength H (A/m) and the magnetic flux density B (Tesla). The relationship between these two quantities is.
B=uH
where u is a material-dependent parameter called permeability. The permeability varies not only with the electrical conductivity of the material, but also with the temperature and the frequency of the magnetic field, H and B being proportional.
Systems for AC magnetism
Unlike systems based on coils using pulsed DC technology, AC (alternating current) based magnetic tracking systems are less affected by the earth's magnetic field and artificial magnetic fields from electronic devices.
Systems for permanent magnets
A typical system consists of a plurality of static magnetic sensors that measure the magnetic flux density of a moving magnet. A plurality of static permanent magnets at a known location can be used to locate the moving magnetic sensors. Current methods suggest a measurement volume of 1 cubic meter, which limits the method to proximity use, such as medical applications. A major challenge in using permanent magnets for localization arises from the complexity of the magnetic field. Mathematical models include higher-order nonlinear equations that create multi-peaked objective functions with multiple local optima for the location solution.
Systems using magnetic fingerprints
The idea of magnetic fingerprinting comes from animals, which locate themselves by localized anomalies in the Earth's magnetic field. Similarly, in buildings, each location is characterized by its unique magnetic flux density. These spatial fluctuations come from natural and man-made factors such as metal building materials, electrical systems, and industrial equipment. Anomalies in the magnetic field are sufficiently variable in space to be detected by magnetometers. The fingerprinting method can be applied under the assumption that the magnetic field in a building is approximately static. A magnetic map of the room is obtained during the setup phase and the current position is determined by comparing the current flux density with flux density values stored in a database
Application areas for magnetic positioning
Magnetic positioning is an IPS(Indoor Positioning)) solution, which exploits magnetic field anomalies in indoor settings and uses them as unique place identification features. The first references to magnetic anomaly-based localization date back to 1970 for military applications (a guidance system that employs three full-field magnetometer sensors located in a plane and distributed equiangularly around the axis of motion). Indoor localization using magnetic field anomalies first appeared in robotics-related papers in the early 2000s. More recent applications can use magnetic sensor data from a smartphone for wirelessly localizing objects or people inside a building.
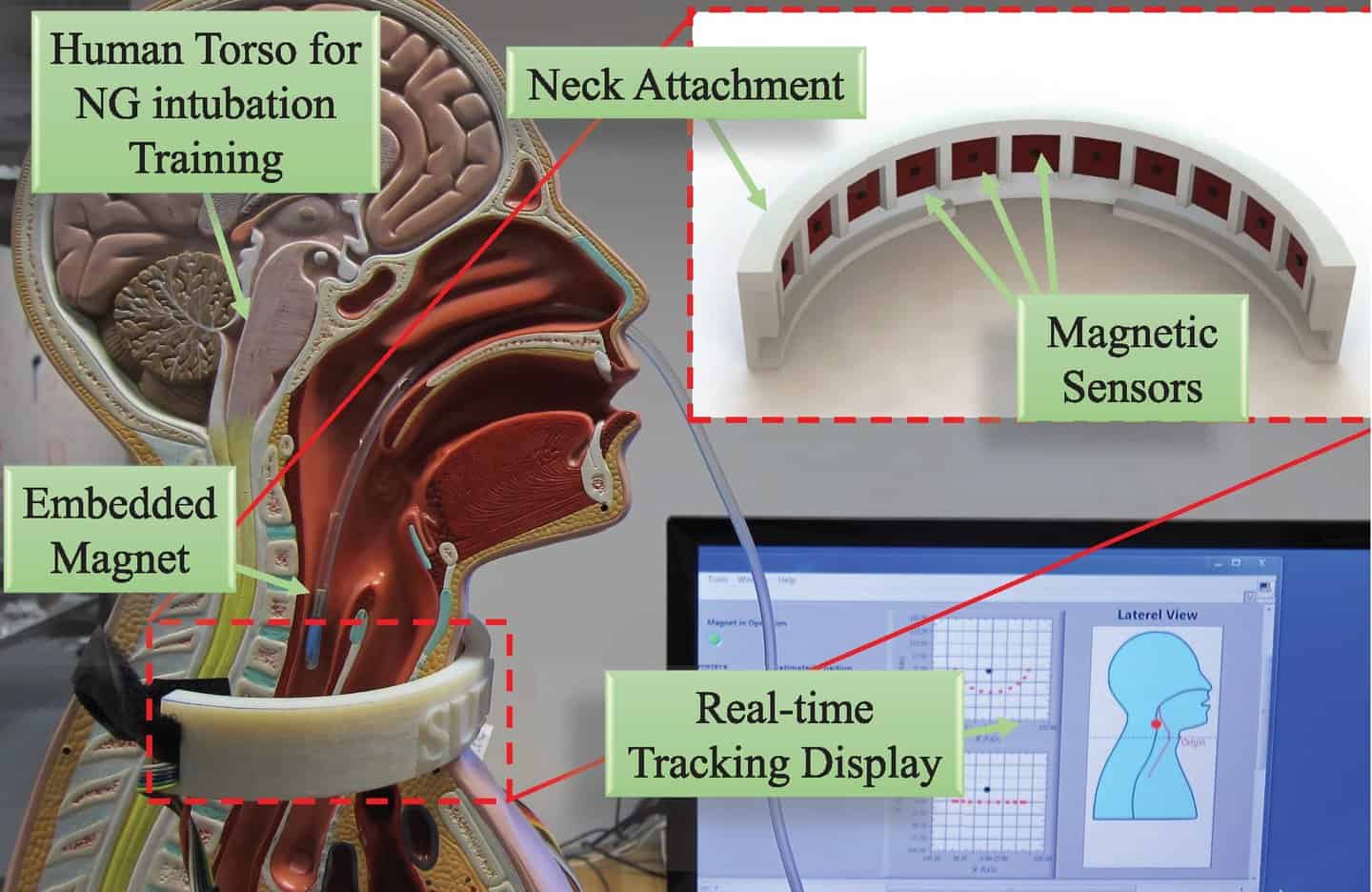
There is no single standard on indoor positioning, but magnetic positioning appears to be the most complete and cost-effective. It provides accuracy without any hardware requirements and has a relatively low total cost of ownership. Magnetic positioning is used in many indoor positioning applications such as industrial, medical and IoT because it does not have the advantages associated with line-of-sight requirements, multipath and fading, low cost of transmitters and receivers, and simple development of coils and magnetic sensor setups, and therefore in short-range applications the technology may have some advantages over ultrasonic, laser, or RF, said professor of the Singapore University of Technology and DesignSHAOHUI FOONGThere is an article on medical care that describes magnetic positioning for use in medical programs.
groundOpus ResearchMagnetic positioning will become a "basic" indoor positioning technology, according to the United States Department of Defense. However, the optimal design of a positioning system based on magnetic measurements depends on several factors: the size, number and optimal position of the anchors, the uncertainties caused by the sensor elements, and the data acquisition system, while fixing the required accuracy and energy constraints.
depending on the relevantresearch report, the global market for magnetic localization systems in the healthcare industry is expected to grow at a robust CAGR over the forecast period (i.e., 2022 to 2030), thereby generating substantial revenue. The growth of the market is mainly attributed to the growing demand for minimally invasive surgeries by patients across the world coupled with the escalating use of magnetic localization systems by physicians for proper navigation of internal organs. Meanwhile, increasing prevalence of chronic diseases such as osteoarthritis and brain cancer is also expected to drive the market growth in the near future.
Related companies
GiPStech
Founded in 2014, they were able to implement an indoor localization platform that is based on fingerprinting of a building's geomagnetic field and advanced sensor fusion to accurately locate devices and their users without any infrastructure. In addition, the platform is able to compensate for most of the known problems of localized magnetic field variations.
Indoor Atlas
Founded in 2012, with dual headquarters in Mountain View, California and Oulu, Finland. They study buildings with unique magnetic landscapes created by the Earth's magnetic field, and therefore use the magnetic field within a building as a map to accurately track the location of devices.
Content review.