





summarize
interior positioningIPS-Indoor positioning system (IPS) is similar to the Global Positioning System (GPS-Global positioning system), except that GPS is used for global positioning, while IPS is used for smaller indoor areas for more accurate positioning. We have been relying on applications such as Google Maps, Apple Maps, Tencent Maps, Baidu Maps, and AutoNavi Maps. on a daily basis. Accepting the fact that these programs are very useful to us, we must consider extending them to indoor environments in order to extend this location facilitation to buildings to provide a point-to-point navigation system. GPS cannot be used indoors due to the high signal attenuation in buildings. Therefore, there is a need to design an indoor point-to-point navigation system instead of the location-to-location navigation system provided by GPS.
There are a number of different techniques for IPS indoor localization.UWB,bluetooth,RFID,ZigBee, infrared localization, etc. all have their advantages and disadvantages; localization using ultrasonic ranges is a common technique in nature. Bats are known to rely on echolocation to detect insects, emit ultrasonic pulses up to 200 kHz, and are sensitive to extremely subtle differences (down to .0001 kHz). Many cetaceans and some fish use ultrasound for navigation, hunting, and communication. On land, dogs and cats are sensitive to the ultrasonic spectrum, and shrews can use ultrasound at close range to detect objects that pass through grass and moss.

ultrasound spectrum

Ultrasound is a frequency higher than 20,000 HZ of a human ear can not hear the sound waves, due to the human ear hearing range between 20 Hz - 20,000 Hz, if the sound of the vibration frequency higher than 20,000 Hz the human ear can not be heard, therefore, customarily higher than the frequency of 20,000 HZ of the sound waves known as ultrasound.
ultrasoundAmerican National Standards InstituteDefined as "sound with a frequency greater than 20 kHz". In air at atmospheric pressure, ultrasonic waves have a wavelength of 1.9 centimeters or less.
Ultrasound History
Ultrasound can be traced back to the 6th century BC in thePythagoras, who wrote about the mathematical properties of stringed instruments. Echolocation in bats was developed by Italian biologistLazzaro SpallanzaniDiscovered in 1794, when he demonstrated that bats hunted and navigated by inaudible sound rather than sight. Francis Galton, in 1893, invented theGalton Whistle, which is an adjustable whistle that produces ultrasonic waves, he used it to measure the hearing range of humans and other animals, demonstrating that many animals can hear sounds beyond the range of human hearing. The first technological application of ultrasound wasPaul LangevinThe first ultrasonic submarine detector using electrostatic methods (singing capacitors) was publicized, attempting to detect submarines in 1917. Discovered by Jacques and Pierre Curie in 1880piezoelectric effectUseful in transducers to generate and detect ultrasonic waves in air and water.
Ultrasound Applications
Non-Contact Sensors
Ultrasonic level or sensing systems do not require contact with the target; motion sensors and flow measurement, a common ultrasonic application is automatic door openers, where the ultrasonic sensor detects the approach of a person and opens the door
non-destructive testing
Ultrasonic inspection is a type of non-destructive testing that is often used to find defects in materials and to measure the thickness of an object. Low-frequency ultrasound (50-500 kHz) can also be used to inspect less dense materials such as wood, concrete and cement.
Ultrasonography of welded joints has been an alternative to radiographic NDEs
Ultrasonic thickness measurement is a technique used to monitor the quality of welded seams
ultrasonic ranging
A common use of ultrasound is underwater range finding; this usage, also known as sonar, allows for distance determination by measuring the time difference between the transmitted pulse and the received echo
ultrasound imaging
Medical ultrasound examination, the use of ultrasound waves generated by the propagation of the human body, through the wave display screen to show the various organs and tissues in the body to the ultrasound reflection and attenuation pattern to diagnose diseases
Acoustic microscopy technology: ultrasonic propagation in the medium, if encountered in different density or elasticity coefficient of the material, will produce a reflection echo, and the intensity of such a reflection echo will vary depending on the density of the material, the scanning acoustic microscope (SAM) to use this feature to detect defects within the material and according to the received signal changes into an image.
Ultrasonic Power Devices
High power applications of ultrasound typically use frequencies between 20 kHz and several hundred kHz. The intensity can be very high; above 10 watts per square centimeter, cavitation can be induced in liquid media, with some applications using up to 1000 watts per square centimeter. This high intensity can induce chemical changes or produce significant effects through direct mechanical action and can inactivate harmful microorganisms. Therefore, the application of this characteristic can be done ultrasonic therapy, metallurgical processing, ultrasonic cleaning machine, ultrasonic humidifier, ultrasonic welding
ultrasonic positioning
Applications of ultrasound-based localization systems are indoor tracking of people and mobile devices, but these systems are rarely used in outdoor environments due to three reasons:(1),Temperature variations are much greater outdoors and therefore more complex to model or compensate for. (2), wind can significantly degrade system accuracy. (3), the typical limit of about 10 meters for distance measurements is impractical for outdoor use. Although the ultrasound system can be expanded by adding more fixed nodes, deploying nodes in outdoor environments is problematic due to the absence of ceilings or nearby walls.
The most critical influence on the ultrasonic speed of sound vUS is the temperature t. The correlation is
vUS = (331.3 + 0.606 ∙T ) m/s; where T is the absolute temperature in degrees Celsius (°C)
Three types of ultrasonic positioning
- In active device systems, mobile devices actively send signals. Therefore, the transmission of ultrasound pulses needs to be well dispatched between mobile devices. The disadvantage of active device systems is the lack of scalability, i.e., if too many users with ultrasound devices congregate in a room, the chance of signal overlap increases. A well-coordinated scheme for inter-device pulse transmission may solve this problem, but at the cost of reduced measurement rates
- Passive systems rely on a permanently installed transmitter that broadcasts an ultrasonic signal to the receiving device. The advantage of this architecture is that it protects the privacy of the user. Mobile passive devices only receive signals and do not transmit anything. Therefore, the localization is performed exclusively on the device without any network interaction. The number of users can be scaled without any risk of signal overlap
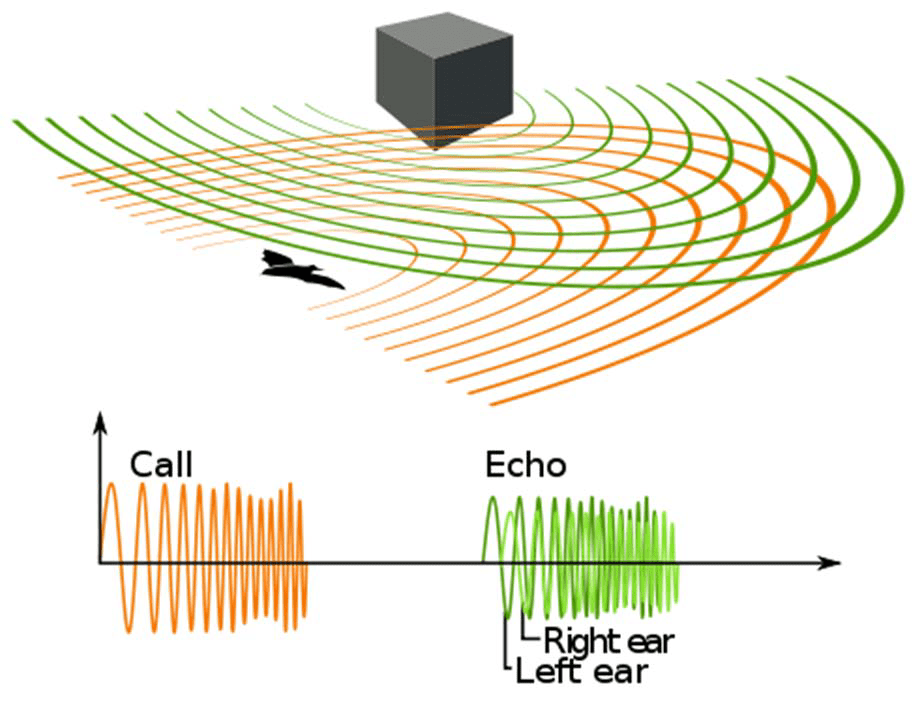
- Echo ranging, similar to biosonar used by several animals such as bats, has the potential to emit sound pulses into the environment via a transmitter and use the returned echoes to locate and identify objects, or even to determine the location of the transmitter. The principle of binaural (i.e., based on two receivers) localization is shown below. The advantage of echolocation systems is that they can operate without beacons or tags
Ultrasonic Positioning Successful Companies
be directed againstWireless Indoor Positioningproblem, many scholars and researchers have conducted a lot of research and proposed many effective indoor positioning algorithms. According to the positioning principle, indoor positioning algorithms are mainly divided into two categories: time-based ranging positioning and received signal strength indication (RSSI) positioning. Time-based ranging methods mainly include: time-of-arrival (TOA) localization, time-difference-of-arrival (TDOA) localization, and so on. The TOA-based localization algorithm has defects such as noise sensitivity, multipath reflection and reference clock inaccuracy, and large distance estimation error. TDOA-based positioning algorithms require synchronization between devices. However, due to limited indoor distance, the distance measurement error is large.
Sonitor IPS Holding ASA company that can be said to have been very successful in locating applications with ultrasonic technology is said to be currently the only manufacturer of an ultrasonic-based indoor tracking system that uses a relatively small number of detector systems (currently one for every four rooms) to listen for specific signals from the trackers and determine which trackers are located in which rooms. Since its inception in 1997 it has been using ultrasound technology as its core computing, and after more than 20 years of development, its products have been recognized by many customers, especially in the healthcare field, ranging from patient care, nurse call to infection control, and from patient flow to asset management.
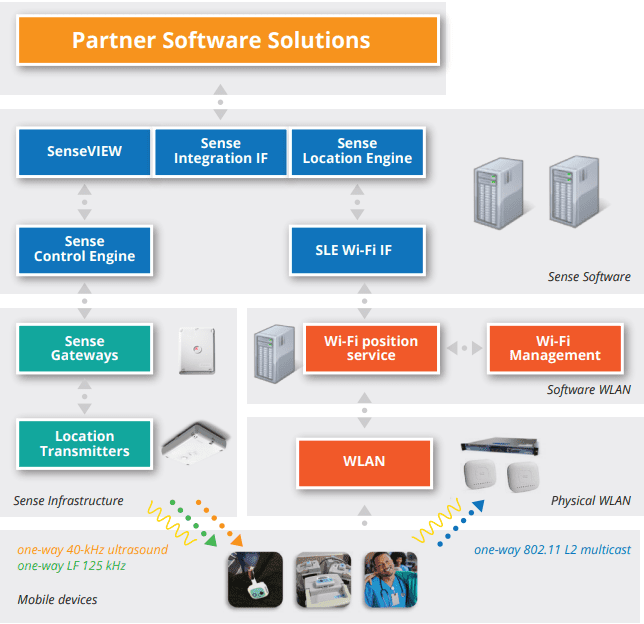
Quad-LT (Location Transmitters) are wireless (Power over Ethernet (PoE) optional), multi-functional, battery-powered (4 standard D-cell 1.5V standard batteries) devices that are mounted on ceilings (via simple clips) or walls and are assigned a unique identification (ID). These LTs transmit an ultrasonic signal synchronized by the gateway, which is then picked up by a tag/badge that also has a unique ID. When the tags/badges receive location information from the LTs, they communicate that location to the server over Wi-Fi, providing the exact location of the tag at the exact moment the signal is received. The ultrasound LT can combine ultrasound and low frequency transmitters in a single unit and improve the positioning accuracy and update rate of SmartTags and SmartBadges that receive ultrasound signals.
Content review.